V
主页
四足legged_control实机调试
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
legged control 成功部署在A1
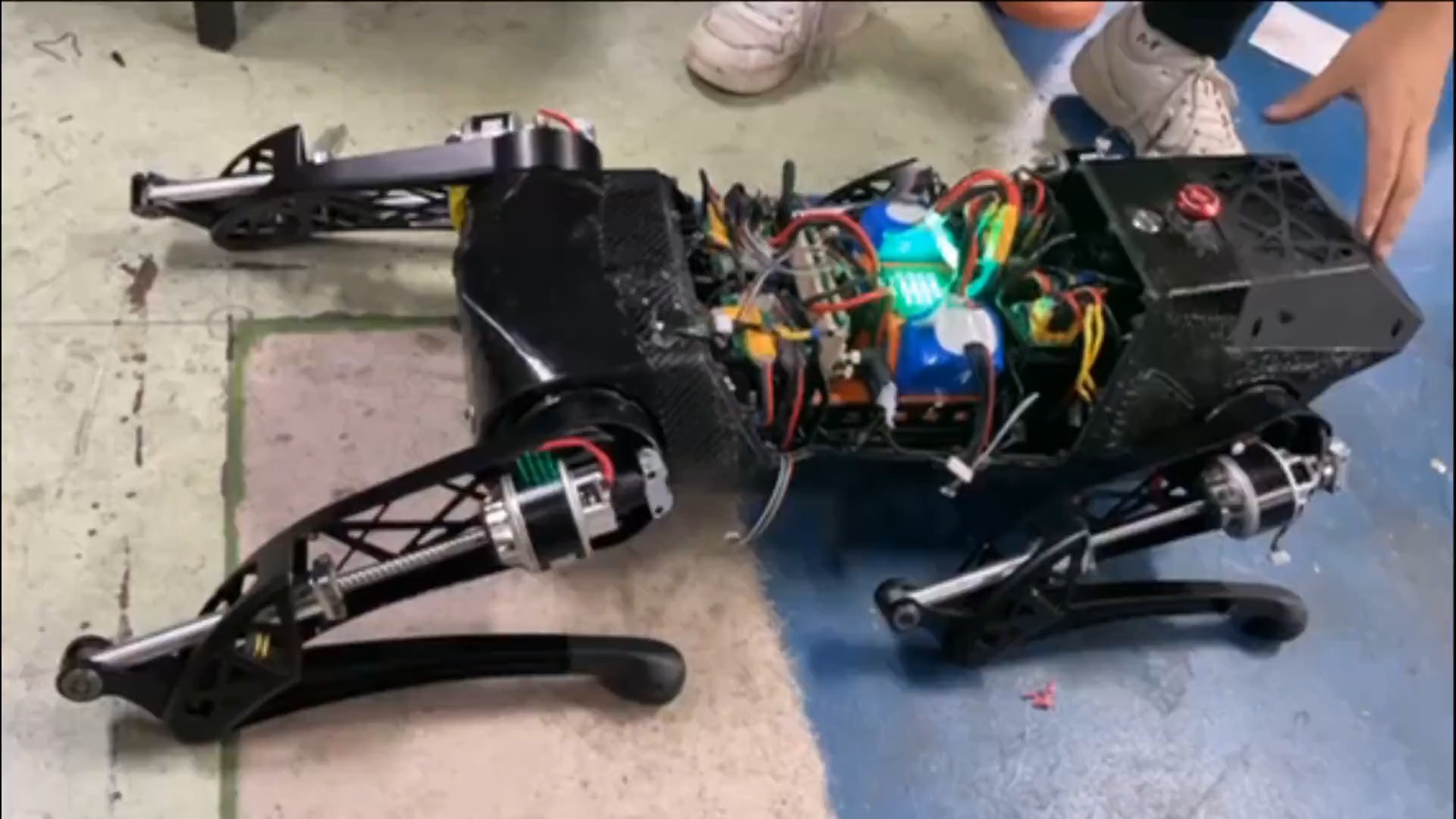
DIY四足仿生机械结构
线传动狗腿,答辩结束啦
【波士顿动力】跳沙跳机器人
Learning-based control of a quadruped robot on MJX.
2023东北大学四足机器人Actiger机构分享
四足机器人感知爬楼梯、高台
高速旋转机器狗 | 无刷电机 绳索 绞盘 减速器 方案 #机器狗探索
别 扒 拉 我
2017年,开局一条狗
在世界机器人大会,又见到了本末科技的轮足机器人#世界机器人大会#轮足机器人#人工智能
rl课程同步上线
IP67加强版三关节模组
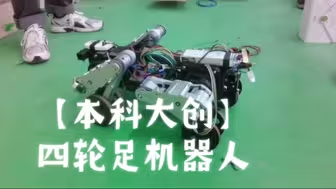
【本科大创项目】几个星期赶工出来的轮足机器人
迷你哨兵(bushi
开源四足控制器 legged_control 测试视频
目前机器狗的开源现状
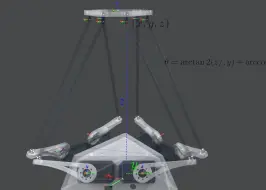
蜘蛛手的逆运动学求解
四轮足机器人能够适应多种复杂地形,如楼梯、斜坡等,同时保持高效的移动速度和良好的负载能力。
飞镖!×35
这是你见过自由度最高的轮足机器人!带臂轮足运动能力实机展示
半自动就好了
机器人单腿跳
非常好U8,使我的R1旋转
robocon2024备赛记录
光学辅瞄前哨 十秒迅速推掉(bushi
全新坐骑
2017年,宇树第一台Laikago样机性能展示(仅此一台)
盘点那些有趣的桌面机械臂6
线传动机械狗腿子大弹跳测试
今天来点背后的研发日常
机械传动欣赏
安装飞控
【人形机器人规划和控制】全身运动规划之旋转跳跃
工业机器人的皮带传动特写
宇树G1量产版本,跳向未来,加速!
RL vs MPC,LeCun:MPC,胜!我不看好强化学习
还是要留点小寄录~~
创意十足,国内本末科技研发的可分身重组轮足机器人。动态负载能力强大,还可以组合和分身。他在物流,探测,安保,巡逻等场景中拥有广阔的应用空间。
robocon 2019南部赛区 武大四足