V
主页
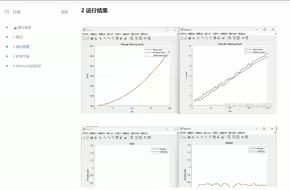
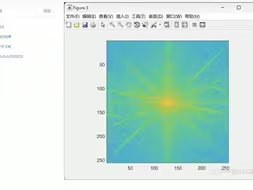
不确定性感知轨迹规划:利用不确定性量化和传播在移动机器人可穿越性预测中的应用研究(Matlab代码实现)
发布人
不确定性感知轨迹规划:利用不确定性量化和传播在移动机器人可穿越性预测中的应用研究(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
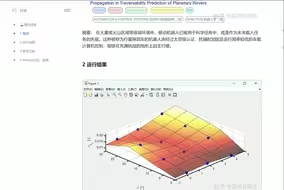
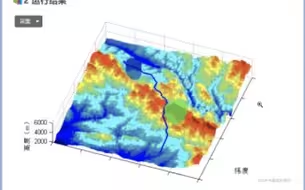
不确定性感知轨迹规划:在行星探测车可通行性预测中运用不确定性量化与传播(Matlab代码实现)
利用Astar算法实现飞行轨迹的三维规划(基于Matlab代码实现)
【模型预测控制MPC】使用二次规划来模拟多输入多输出(MIMO)系统的模型预测控制(Matlab代码实现)
【智能优化算法 蜣螂算法】DBO蜣螂优化算法原理与matlab代码实现,附:代码 课件
基于PID控制器和卡尔曼滤波器的机器人控制(Matlab代码实现)
首发—手把手介绍如何将理论应用到matlab代码
【每发表过的创新点】基于BiTCN-LSTM的风电功率预测研究(Matlab代码实现)
v基于VMD-LSTM的电力负荷预测研究(Matlab代码实现)
【信息矩阵融合算法】【融合】【Dempster-Shafer】自动驾驶应用中环境感知的目标级融合研究(Matlab代码实现)
利用Astar算法实现飞行轨迹的三维规划(基于Matlab代码实现)
【无人机】四轴无人机的轨迹进行可视化和动画处理(Matlab代码实现)
【无人船】基于模型预测控制(MPC)对USV进行自主控制研究(Matlab代码实现)
【基于PID/LQR的姿态/速度控制】【模拟和控制UUV】基于水动力模型的螺旋桨驱动机器人模拟研究(Matlab代码实现)
基于量子粒子群算法(QPSO)优化LSTM的风电、负荷等时间序列预测算法(Matlab代码实现)
KF,EKF,IEKF 算法的基本原理并构建推导出四轮前驱自主移动机器人的运动学模型和观测模型(Matlab代码实现)
基于BP神经网络的轨迹跟踪研究(Matlab代码实现)
【无人机路径规划】基于深度强化学习的多无人机辅助边缘计算网络路径规划(Matlab代码实现)
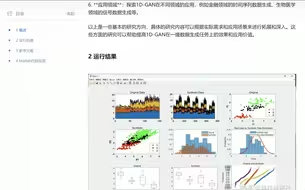
基于1D-GAN生成对抗网络的数据生成方法研究(Matlab代码实现)
【时间序列谐波分析HANTS】HANTS用于去除异常值、平滑数据集、插值缺失数据以及压缩数据研究(Matlab代码实现)
从可观测性的角度研究基于扩展卡尔曼滤波器(EKF)的同时定位与地图构建(SLAM)中的不一致性问题(Matlab代码实现)
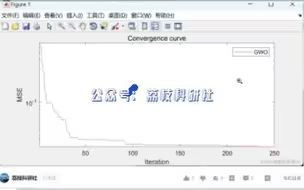
灰狼优化算法训练多层感知神经网络研究(Matlab代码实现)
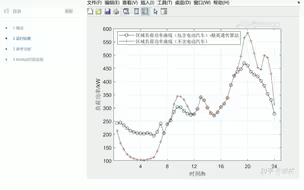
基于CNN-BiLSTM的风电功率预测研究(Matlab代码实现)
基于精英遗传算法的电动汽车有序充电方法研究(Matlab代码实现)
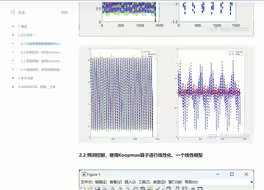
基于数据驱动的 Koopman 算子的递归神经网络模型线性化,用于纳米定位系统的预测控制研究(Matlab代码实现)
基于卡尔曼滤波KalmanFilter的估计估计研究(Matlab代码实现)
【高质量高效的单像素成像】通过傅里叶频谱采集实现了单像素成像研究(Matlab代码实现)
【没发表过的创新点】基于TCN-GRU-Attention的风电功率预测研究(Matlab代码实现)
研究生自学必看!耗时8个月时间整理的公式代码一条龙【MATLAB论文复现】教程,带你轻松复刻MATLAB论文从公式到代码完整流程!
【多变量输入超前多步预测】基于Transformer的光伏功率预测研究(Matlab代码实现)
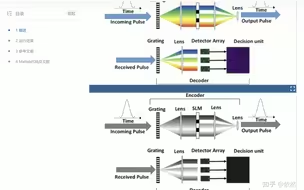
【脉冲通信】用于空间应用的飞秒脉冲通信的符号误码率模型研究(Matlab代码实现)
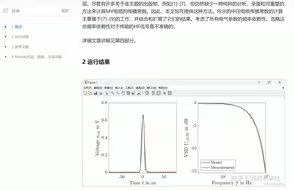
【电缆】中压电缆局部放电的传输模型研究(Matlab代码实现)
【四轴飞行器】非线性三自由度四轴飞行器模拟器研究(Matlab代码实现)
一种利雅普诺夫方法用于分布式端口-哈密顿系统的鲁棒调节研究(Matlab代码实现)
【博士论文】基于局部中心量度的聚类算法研究(Matlab代码实现)
多旋翼物流无人机节能轨迹规划(Python代码实现)
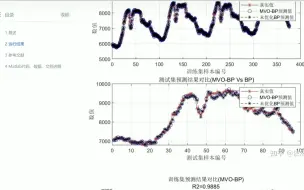
基于MVO-BP多元宇宙算法优化BP多维时序回归预测研究(Matlab代码实现)
2bit超表面生成任意角度波束的MATLAB代码
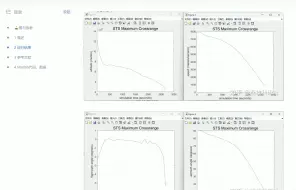
【航空航天器】在飞行路径坐标系中对航空航天器的轨迹进行建模,从轨迹优化中提取的迎角和倾斜信息飞行STS最大横向范围重入轨迹研究(Matlab代码实现)
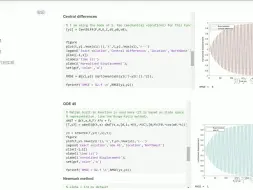
对单自由度系统的强制振动进行数值方法研究的实现(Matlab代码实现)