V
主页
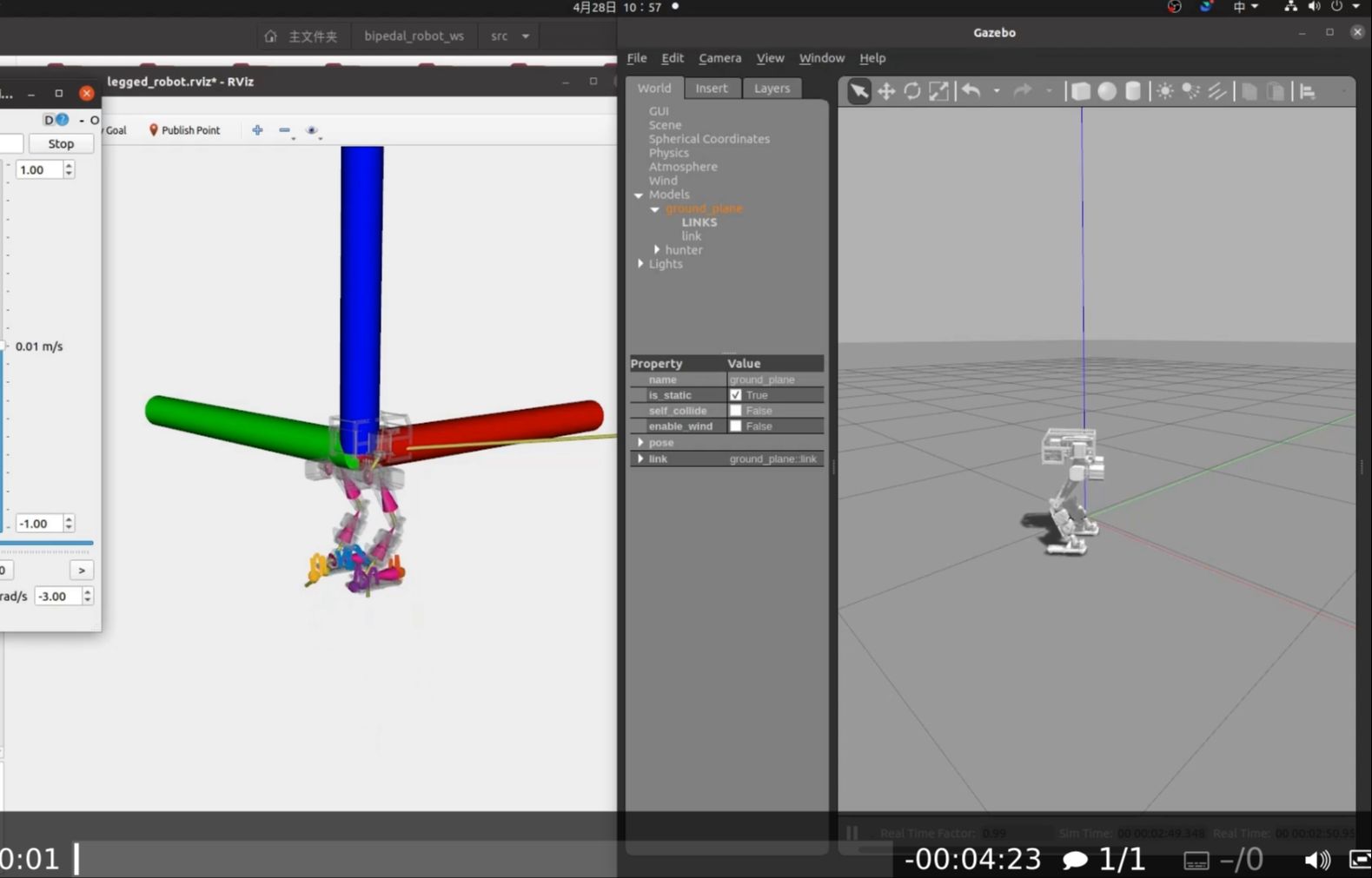
高擎机电12自由度双足机器人pai的算法开源|传统控制篇
发布人
为了方便开发者使用我们的平台,本次开源的算法在12自由度的pai上面进行了仿真验证。 开源的代码放在了github上 ,项目名为livelybot_dynamic_control: https://github.com/HighTorque-Robotics/livelybot_dynamic_control.git 开源项目交流添加小管家(官方客服微信:GQJD2022)
打开封面
下载高清视频
观看高清视频
视频下载器
DIY6轴小机械臂,本体2kg负载1kg!
高擎机电运动控制算法开源|强化学习篇
我们做了一款双足机器人
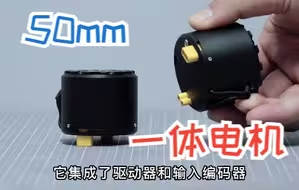
DIY一体关节电机 机器人关节电机 50mm外径 支持双编码器 集成驱动器
双足机器人第一次行走
随便做了个四足,没想到负载这么猛
⚡你抄我码⚡你抄我代码?😡
我再也不要做飞机杯测评师了
吃糖五个月胸部发育了多少?
粗短VS细长,哪种弟弟更好
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄
基于我们自研关节电机的四足狗,下地了!
用自制小型减速电机做个机器四足狗
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
HTM-5047 关节电机性能测试
DIY减速机 重复定位精度1.24弧秒
触目惊心!原来国内高校计算机课堂已经烂成这样了......
今天测试DIY减速电机的运转温度,恒定在46℃-47℃,运行稳定
自主研发电机控制板HTBOT-04,单通道一拖十,1000hz
以前书手把手教你能自学成才 现在必须交学费 防自学
2024年广东省工程实践与创新能力大赛,智能物流搬运赛项,初赛,B37,2024年7月27日
猜猜我们设计的可反驱减速机的减速比
【发售】一体关节电机+双编码器 外经50mm高46mm 额定扭矩2牛米,峰值8牛米 堵转11牛米
HTM-5046 新手使用教程
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
【研1基本功 别人不教的,那就我来】SSH+Git+Gitee+Vscode 学会了就是代码管理大师
机器狗go2 空翻|越障|跑酷 Issac sim| 强化学习
【手把手教做轮足机器人】5_转弯控制+闭环走直线【原理讲解+代码开源】
武汉大学机器人队2024校内赛
还是要留点小寄录~~
耗时六个月,我造出了《三体》中机器人刺杀罗辑的KILLER病毒
把高冷型性格的机器人放在人群中测试它的功能和反应和性能,目前一切正常,不会有攻击行为。差不多算是合格了。
最流行的 6 种 API 架构风格
Rust 窃取了 C++ 的最佳功能
这是什么变速箱原理吗?
为什么科幻界对“机械飞升”津津乐道,而“基因飞升”却几乎无人问津?
最新猫女机器人
月薪两万在中国什么水平?
世界上最难制造的15大东西
受液滴表面张力启发的可变刚度变形轮|2024 Science Robotics【韩国科学技术大学】