V
主页
基于Transformer开源通用动力学模型驱动轮式机器人敏捷控制
发布人
数据收集和模型训练代码已开源,开发者还公布了硬件配置清单,获取更多 AnyCar 详细信息,在后台回复关键词 241017
打开封面
下载高清视频
观看高清视频
视频下载器
Transformer+小样本学习,凭实力霸榜顶会!
今天把我做的这个机械臂开源
【全126集】目前B站最系统的Transformer教程!入门到进阶,全程干货讲解!拿走不谢!(神经网络/NLP/注意力机制/大模型/GPT/RNN)
ChatGPT驱动清洁机器人背后依靠强化学习开源项目
腾讯开源国产AI视频生成项目VideoCrafter2
AI驱动的增强现实手术平台来了,如果医生用这个平台给你做手术你敢同意么?
有避让能力的运动机器人,看着好像有点尿急
视觉大模型RAG驱动具身智能机器人英伟达开源ReMEmbR
用2台苹果电脑运行Llama3.1-405B大模型,开源异构集群方案真行
新手入门机器学习开源教程 李沐动手学深度学习
英伟达开源自动驾驶多模态大模型
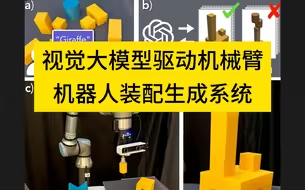
AI视觉大模型驱动机械臂机器人装配生成系统
图解GPT可视化Transformer直观理解大模型运行原理
微软亚研开源DragNUWA可控AI视频生成模型
字节开源的UniRef++图像分割模型
15分钟手把手教你在RAG中如何选择合适的embedding模型!附解析代码!
零延迟实时生成游戏拿到2100万美元融资模型代码完整开源
计算机视觉模型让物理图表动起来AI改变教育
机器人学动力学三点
Rabbit R1的AI开源平替,苹果快捷指令搞定,无需额外硬件
用PyTorch从头构建多模态大模型完整代码已开源
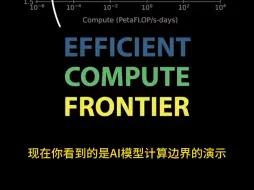
直观演示AI模型计算边界,展示算力和参数以及数据集之间的关系
自动生成Agent的开源项目 动手做AI Agent
开源视频生成大模型Vchitect
机器人除了炒菜,还能够应用于哪些超乎你想象的领域?
12腿无线步行桌软件生成设计CNC竹制部件Arduino机械艺术品
打开GPT模型黑匣子 算法可视化 动手实践生成式AI
Channel 1发布AI主播项目,100%人工智能驱动新闻生产
墨水屏阅读器运行Qwen2端侧0.5B大模型
神经网络图解大全结合李宏毅点赞的深度学习详解
都2024了,还不知道先学Transformer还是Diffusion?迪哥精讲BERT、Swin、DETR、VIT四大核心模型,原理讲解+论文解读+代码复现!
AI颠覆3D动作捕捉,不再需要追踪器一台手机就可以实现动作捕捉
MetaAI才是OpenAI,小扎宣布开源Llama3.1媲美闭源GPT4o模型
苹果VisionPro应用生态开始发力,虚拟空间社交应用
2024最新版LangChain教程,后附实战!LangChain零基础入门到精通(干货满满)合集!手把手教你从知识学习到实战项目,带你从零基础/转行小白到就业
Yann LeCun直言AI偏见不可避免,开源才是良方
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
直观理解CNN神经网络,跟着李沐大神动手学深度学习
开源视频编辑项目,主体替换背景不变
视觉触觉融合推理 机械手轻松拿捏小奶龙