V
主页
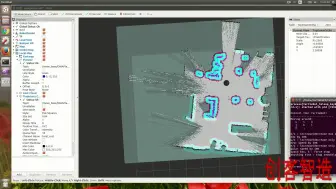
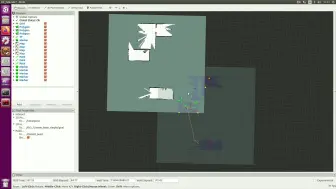
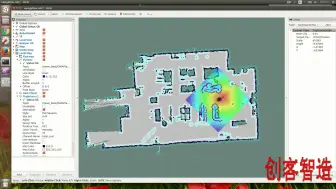
Turbot-kinect1自主建图-房间
发布人
教程链接: https://www.ncnynl.com/archives/201706/1716.html 更多资料请关注创客智造官网:www.ncnynl.com && 创客智造淘宝店链接:ncnynl.taobao.com 欢迎加入我们的ROS交流群: B群|926779095 && C群|937347681 && D群|562093920
打开封面
下载高清视频
观看高清视频
视频下载器
Turtlebot仿真-rrt_exploration单机自主探索建图
Turtlebot3-openCR_upload
Turtlebot3-主从机设置
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
ROS&lidar-镭神智能16线混合固态雷达_测试使用
Turtlebot3-burger-定点导航
Turtlebot3-burger-多机建图
TurtleBot4-slam_toolbox同步建图
Turtlebot3-burger-LDS-gmapping建图
Turbot-VSLAM-dso建图(Kinect 1)
walking机器人入门教程-slam_toolbox算法建图
ORB-SLAM2实操难吗
Turbot-A2-karto建图
tb3-foxy-nav2自主导航
Turbot-kinect1-多点无序自主导航
TurtleBot4-树莓派4连接本地WiFi网络
Turbot-kinect1-动态避障01-房间
Turtlebot3-ROS2-Dashing-Cartographer建图
Turbot-kinect1-RTAB-MAP视觉建图-房间
自制ros建图导航机器人2
Turbot4机器人入门教程-NoMachine远程控制
Turbot-a2-amcl导航
Turbot2-组装
r3live语义建图
Turbot-A2-动态避障-房间
Turbot3-Multi与仿真教程-多机RRT自主探索建图
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
Turbot-DL-kinectV1-amcl导航
TurtleBot4-树莓派4设置固定IP
Turtlebot3-burgrer-LDS-frontier_exploration建图
Turbot-充电
Ailibot-qt-移动和显示地图
vinsfusion改进添加线特征
赛事案例|贵州大学赵梓衡团队基于LIMO开发“基于ROS的双上位机大模型语音交互目标检测SLAM导航室内智能车”项目
OpenManipulator-物体识别抓取
Turbot-A2-雷达安装
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
轮足静态障碍物导航避障
TurtleBot4-自主导航
tb3-foxy-slam_toolbox建图