V
主页
vinsfusion改进添加线特征
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ORBSLAM2,RGBD模式添加线特征
PLVINS运行Euroc数据集
基于3D GS的SLAM
r3live语义建图
ORBSLAM3_superpoint(cpu运行)
ORBSLAM3添加线特征
RDS-SLAM+YoloV8-Seg
ORBSLAM3+YOLOV8动态剔除+稠密建图
vinsfusion双目稠密重建
DS-SLAM(CPU运行)
GCNv2_SLAM(支持ros运行)
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
视觉SLAM算法特征点法详解
视觉SLAM特征点法与直接法的区别是什么
SLAM着色点云模型三维重建!
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
SLAM着色点云精细建模园林石雕!
无人车自主探索建图gazebo仿真
点线特征ORBSLAM3
赛博仙女棒研发成功
【SLAM】【VIO】双目视觉+超强三维感知力【应用场景——搭载在地铁列车上】“实测”
港科大沈邵劼团队开源! 自适应交互模态探索的多模态集成预测和决策
视觉SLAM半直接法是什么
基于深度学习特征的长期视觉定位框架
NeRF训练自己的数据
轮足静态障碍物导航避障
3D GS训练自己的数据
隧道里面抡摆锤,暴力SLAM测试!
DynaSLAM(CPU运行)
【3D数学】欧拉角万向节死锁与插值
AirVO运行KITTI数据集
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
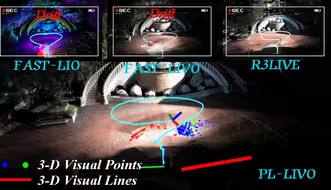
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
视觉SLAM的本质多视图几何
基于先验地图的通用激光雷达定位框架
赛事案例|贵州大学赵梓衡团队基于LIMO开发“基于ROS的双上位机大模型语音交互目标检测SLAM导航室内智能车”项目
第25讲:Egoplanner集群仿真
GPS丢失情况下无人机定位-VIO+VPS
ORB-SLAM3有必要学吗