V
主页
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
发布人
场景应用实测:VIOBOT 搭载在汽车上进行室外高速工作
打开封面
下载高清视频
观看高清视频
视频下载器
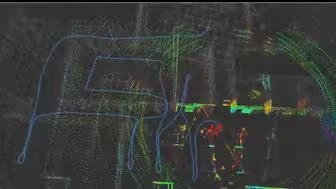
r3live语义建图
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
ROS机器人基于gmapping的slam自动导航建图!
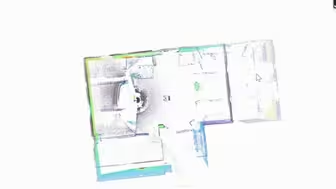
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
【小白教程】使用 PSMNet 估计视差和计算双目深度,并映射到 3D 点云
大疆livox-mid360室外定位
ORB-SLAM3有必要学吗
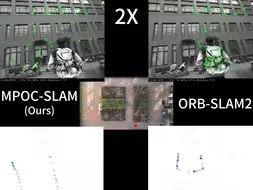
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
微型无人机群SLAM
threejs简单实现剖切透明效果
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
SLAM与三维重建的区别
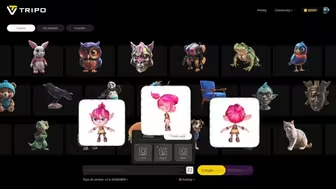
Tripo图生3D在线工具又更新!上传三视图8s生成3D模型
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
视觉SLAM的本质多视图几何
End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
大疆livox-mid360定位
真实意义上的体积显示器。
Groot部分商业动态案例合集
RM 全阵容兵种导航建图避障仿真方案
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
CVPR'24 满分Oral | EscherNet 实现任意视角灵活扩散生成 解锁3D视觉无限可能!
CT三维可视化(2),三维建模,CT三维重建,CT分割,体积,面积测量,CT后处理
无人机室内自主飞行,和地面站操作
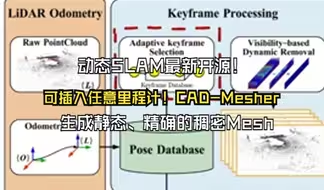
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
CT三维重建,三维可视化系统,三维软件开发,断层扫描重建,定制,CT后处理软件,测试,分析
套件教程-FAST LIO2之点云建图
cesium后处理实现高度雾、场景雾化、天际线
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
多传感器融合四足机器人本体感知算法
三维粒子流4K输出不到半小时,我惊呆了。
视觉SLAM算法入门必备基础知识
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
(耳机)产品动画 pincunF1款