V
主页
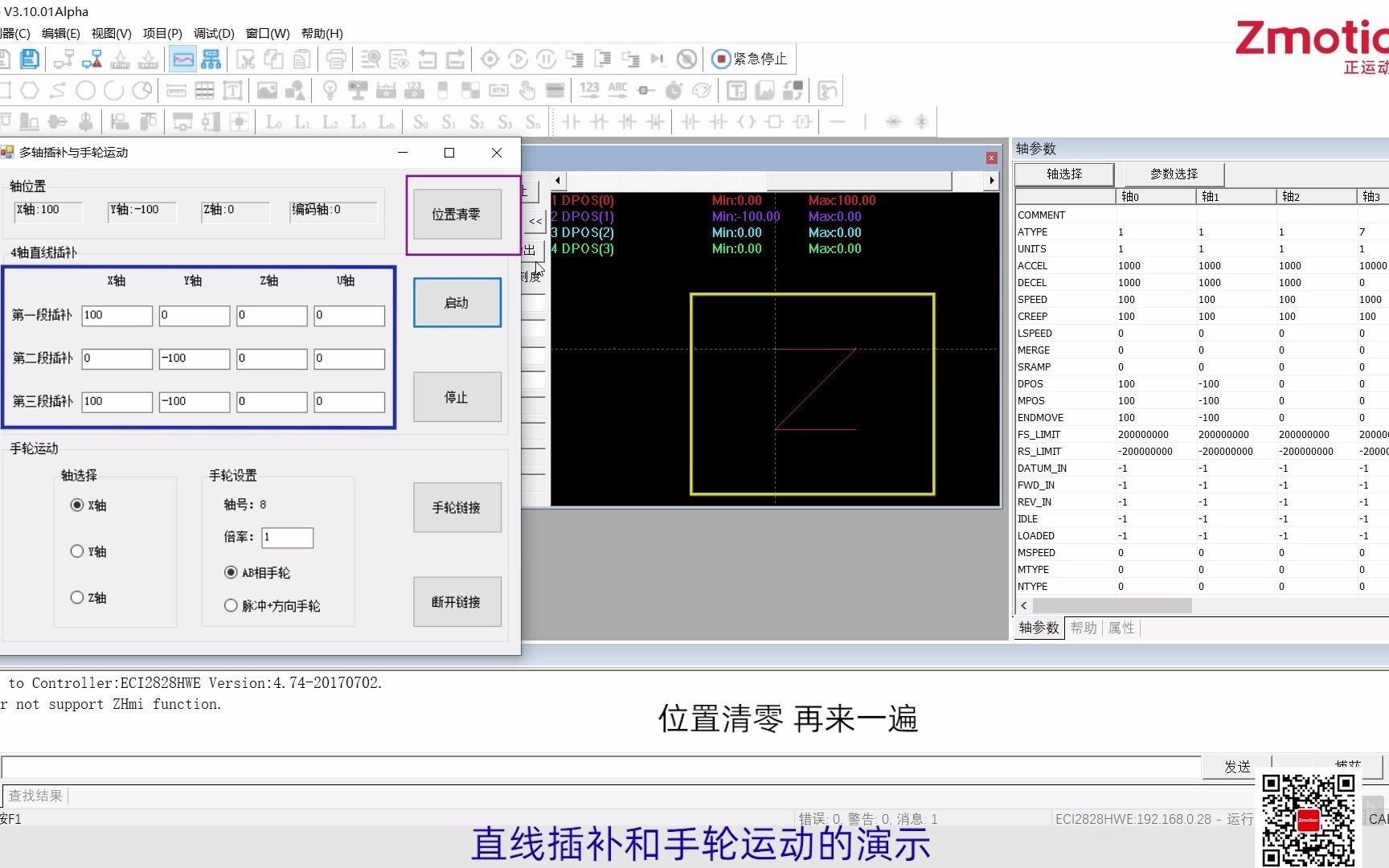
EtherCAT运动控制卡的多轴插补运动和手轮运动
发布人
运动控制卡C#的多轴插补运动和手轮运动
打开封面
下载高清视频
观看高清视频
视频下载器
EtherCAT运动控制器的PLC编程(四) 电子凸轮
会PLC也能玩转机器视觉(二)- 条码识别
机器视觉运动控制一体机应用例程-多目标形状匹配
EtherCAT运动控制卡和LabVIEW构建智能装备(二)
机器视觉运动控制一体机应用例程(二十六)柔性振动盘上料解决方案
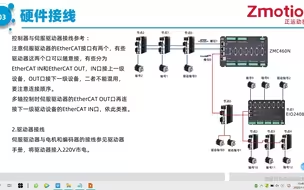
视频教程:如何进行运动控制器EtherCAT总线的基础使用?
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(二):EtherCAT总线初始化
简单易用的运动控制卡(三):轴参数配置和单轴运动控制
正运动技术自主研发运动控制实时内核MotionRT7--Labview例程讲解
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发之驱动安装
高性能PCIe EtherCAT运动控制卡 | XPCIE1032H
VPLC系利机器视觉运动控制一体机快速入门(十)-- ZDevelop实现OCR功能
简单易用的运动控制卡(四)函数库封装
正运动技术视频教程:正运动控制器EtherCAT总线快速入门
正运动技术视频教程:运动控制器多轴同步与电子凸轮指令简介
高性能的64轴总线型运动控制卡PCI464E
你体验过这种心酸吗?
简单易用的运动控制卡(七):一次性加载多条连续小线段数据
EtherCAT运动控制器上位机之Python+Qt(一):链接与单轴运动
正运动技术 | 企业宣传片
【运动控制+机器视觉Demo软件框架系统概述】实训平台调试视频
正运动运动器视频教程:运动控制器基础轴参数与基础运动控制指令
会PLC也能玩转机器视觉(三) BLOB斑点定位
会PLC也能玩转机器视觉(一)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(三):EtherCAT总线CSP,CSV,CST模式切换
简单易用的运动控制卡(十四):PWM、模拟量输出与运动控制的同步
运动控制器的自定义G代码编程应用
Actin控制软件通过实时路径规划和运动控制,对 UR5E 机器人的取放任务及无碰撞作业进行优化。
正运动技术EtherCAT运动控制边缘控制器ZMC432H接口介绍
【加量不加价】高性价比十轴脉冲运动控制卡ECI2A18B 让您的设备在自动化行业内卷中脱颖而出!
EtherCAT运动控制器在UVW对位平台中的应用
学习35天可安排上市公司当技术员,不是私人班,政府单位绝无套路
开放式激光振镜+运动控制器(六)-双振镜运动
简单易用的运动控制卡(十六):螺距补偿和反向间隙补偿
单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发
视频教程:运动控制器激光振镜控制
你觉得让你崩溃的是什么?
MotionRT7 EtherCAT协议安装视频演示
软件概述3
自动铆接设备