V
主页
京东 11.11 红包
ROS话题
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ROS传感器介绍
ROS如何用激光雷达建图
查看里程计、IMU话题信息
ROS多机通信设置
TF坐标变换
roslaunch文件与参数服务器
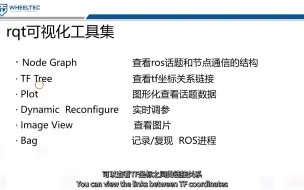
rqt可视化工具集
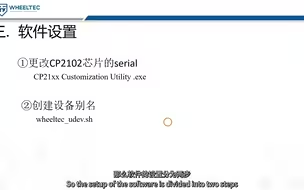
程序修改编译与SublimeText简析
ROS控制 | 第一轮导航代码讲解
如何把ROS和STM32联系起来
回环检测
【开源教程】ROS无人船避障代码讲解
视觉SLAM第三讲 李群与李代数
视觉SLAM第八讲 回环检测
【开源无人机】无人机各飞行模式讲解
ROS控制 | 第一轮控制功能包讲解
【开源无人船】从零组装一艘测绘无人船
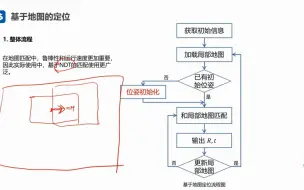
基于点云地图的定位
视觉SLAM第四讲 相机模型
ROS远程唤醒有难度?完全不存在的!
RVIZ配置方法
Ros软路由,跨境电商路由,pptp,l2tp
学长说:有佬的帮助就是不一样!!!
7.2无人机PID参数调试
视觉SLAM第六讲 后端优化
【开源教程】ROS+PX4开源机械臂控制(下)
QT人机交互界面开发方法:自车位姿显示、故障监控、车辆指令、任务下发,车辆载重设置、ROS通讯、QT5&C++ - 主讲人:孟春阳
视觉SLAM十四讲第七讲 后端
【软路由折腾系列】第十一期:RouterOS利用Docker容器安装MosDNS实现DNS分流 |MOSDNS|DNS分流|DNS防泄漏|Container容器
【开源无人船】ArduPilot飞控连接MAVROS
【开源教程】ROS+PX4开源机械臂控制(上)
发布话题控制小车移动
第26讲:无人机检测与追踪行人(YOLO)仿真
【开源教程】ROS基础例程详解
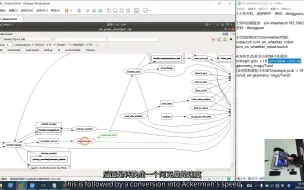
LeAM-LOAM代码讲解
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
LOAM代码部分讲
ROS控制 | 第一轮导航代码使用和计时器使用讲解
视觉SLAM第五讲 视觉里程计
SLAM系统的2种设计范式