V
主页
京东 11.11 红包
rqt可视化工具集
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
如何把ROS和STM32联系起来
RVIZ配置方法
ROS如何用激光雷达建图
ROS传感器介绍
TF坐标变换
roslaunch文件与参数服务器
ROS控制 | 第一轮导航代码讲解
Matlab玩家狂喜!!!纵享丝滑~
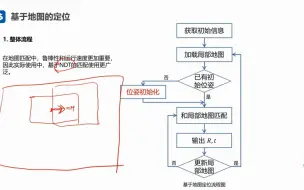
基于点云地图的定位
听劝不要轻易入坑SLAM
回环检测
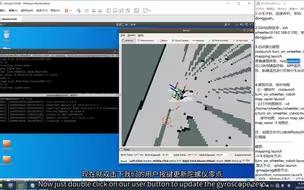
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
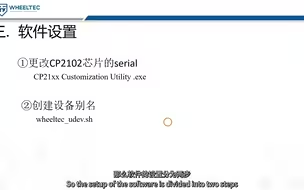
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
第26讲:无人机检测与追踪行人(YOLO)仿真
【开源无人船】从零组装一艘测绘无人船
【开源教程】ROS+PX4开源机械臂控制(下)
【开源无人机】ROS无人机编队代码讲解
视觉SLAM第五讲 视觉里程计
传感器时空标定
ROS话题
【开源教程】ROS+PX4开源机械臂控制(上)
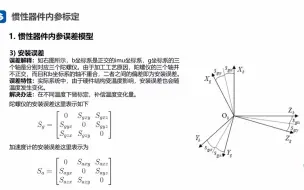
惯性器件内参标定
ROS图像 | 图像目标检测模型训练教程
ROS多机通信设置
有电脑就行!三分钟安装 openEuler 操作系统并搭建ROS环境
ROS控制 | 第一轮控制功能包讲解
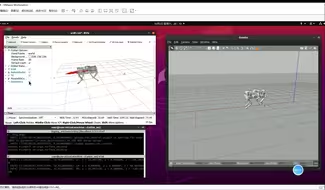
学习小记:如何解决Rviz和Gazebo中机器人运动不同步的问题(Rviz中机器人固定不动的问题)
【开源无人机】无人机各飞行模式讲解
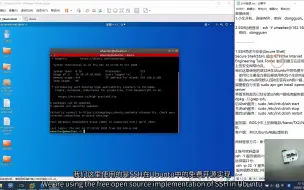
SSH登录
视觉SLAM第四讲 相机模型
成为机器人专家的第一步:掌握这3个前提条件 🤖
纯视觉建图导航
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解
画了一个机器人ROS开发板
视觉SLAM第三讲 李群与李代数
7.2无人机PID参数调试
视觉SLAM十四讲第七讲 后端
【开源教程】ROS无人船避障代码讲解
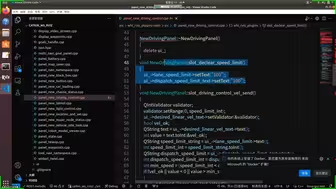
QT人机交互界面开发方法:自车位姿显示、故障监控、车辆指令、任务下发,车辆载重设置、ROS通讯、QT5&C++ - 主讲人:孟春阳
程序修改编译与SublimeText简析