V
主页
视觉SLAM第三讲 李群与李代数
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
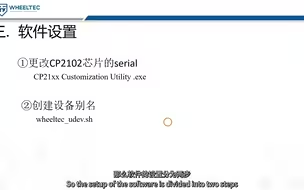
搞SLAM算法为什么要学李群和李代数
【开源】也许会是目前功能最多的激光SLAM(Lidar SLAM)
比啃书高效!清华博士高翔:【视觉slam基础知识从理论到实践】视频教程
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
视觉SLAM的本质多视图几何
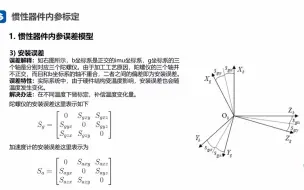
惯性器件内参标定
视觉SLAM十四讲第七讲 后端
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
视觉SLAM第八讲 回环检测
视觉SLAM第五讲 视觉里程计
一起来啃书!【视觉SLAM十四讲】 ,全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!—(计算机视觉、机器学习、神经网络、OpenCV)
如何把ROS和STM32联系起来
第25讲:Egoplanner集群仿真
视觉SLAM第四讲 相机模型
基于深度学习特征的长期视觉定位框架
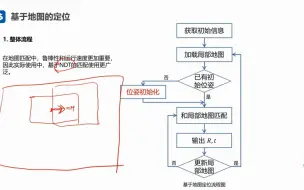
基于点云地图的定位
视觉SLAM算法特征点法详解
【3D数学】认识欧拉角
vinsfusion改进添加线特征
r3live语义建图
秋招迫在眉睫!如何快速上手企业级CV项目?跟着这套教程三小时掌握SLAM算法及其应用,简直不要太好懂!
回环检测
基于ROS2的树莓派自主定位与导航小车
轮足静态障碍物导航避障
GPS丢失情况下无人机定位-VIO+VPS
ORB-SLAM2系统框架解读
视觉SLAM特征点法与直接法的区别是什么
视觉SLAM第六讲 后端优化
第24讲:解决Ego在仿真中不能运行的问题
ROS传感器介绍
传感器时空标定
【SLAM】高翔-视觉SLAM十四讲 配套视频!原著作者亲授!真的通俗易懂!(人工智能、深度学习、机器学习算法、图像处理、机器学习实战)
视觉SLAM半直接法是什么
ORB-SLAM2实操难吗
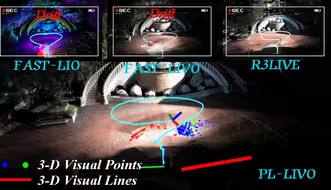
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
视觉SLAM算法入门必备基础知识
纯视觉建图导航
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
无人机室内自主飞行,和地面站操作
【3D数学】欧拉角万向节死锁与插值