V
主页
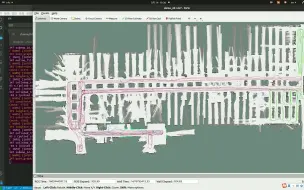
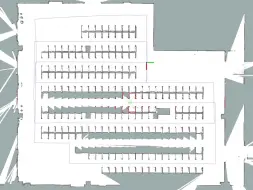
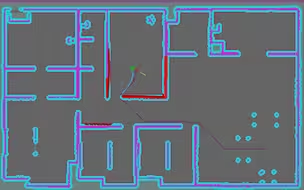
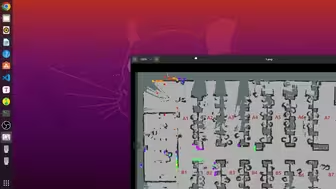
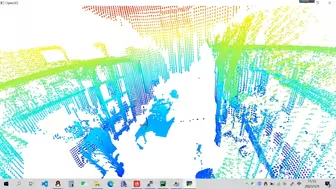
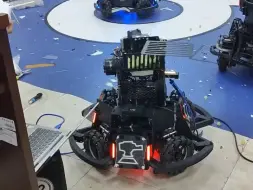
Lifelong SLAM ! 树莓派4B也能建3万平方米的大地图,还能实时动态更新!
发布人
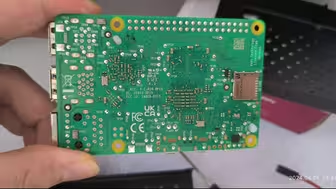
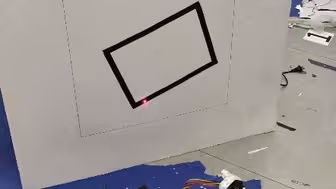
使用树莓派4B构建室内约3万平方米大地图,定位过程中能够实时动态更新地图。 本人目前硕士在读,希望能和各位同行、领域大佬交流技术经验。
打开封面
下载高清视频
观看高清视频
视频下载器
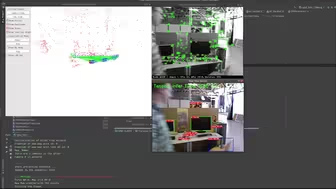
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
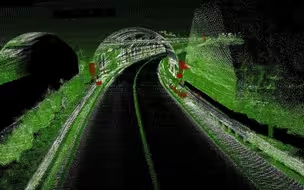
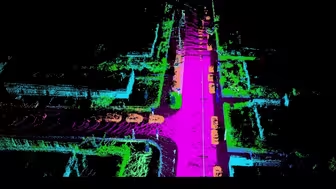
SLAM高速路/隧道建图
宇树激光雷达测试!被它的低成本和小型化着实惊艳到了,USB即插即用!
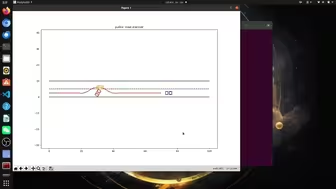
大规模环境下地图实时更新与长期准确定位
RTK定位为什么精度那么高?看完你全明白了,还有教程...
高相似工业场景中的slam测试
单片机比我们想象的更强大
Yolov8+ORBSLAM3+动态物体剔除
Livox激光雷达LiDAR 树林手持建图测试
《多传感器融合与非线性滤波》
Cartographer-SLAM建图 与 动态权重A*的路径规划
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
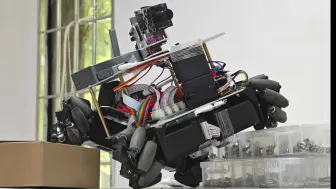
大二菜鸡第一次用rk3588从零开始做视觉小车(比较菜轻喷)
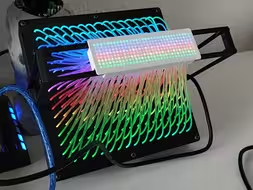
光纤显示器,树莓派Pico,像素屏幕使用RGB LED面板与光传输光纤链。Fiber Optic Display
MGS-SLAM:深度平滑正则化的单目稀疏跟踪和高斯映射
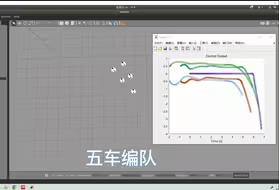
基于Matlab联合Ros的多智能体编队控制算法验证
cartographer系统集成-难题探讨-探讨重定位的流程、效率、准确率
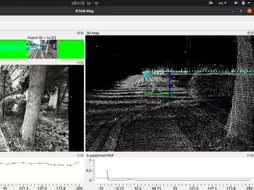
告别词袋模型,也无需GPU,VSLAM的完美边缘计算解决方案,现已加入RTAB-Map大礼包
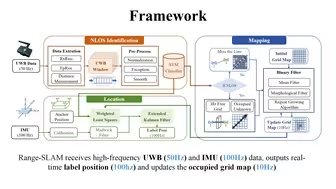
【UWB 在线建图】Range-SLAM: UWB-based Realtime Indoor Location and Mapping
树莓派5开机速度
激光雷达语义建图,LIO-SAM定位,RangeNet++推理语义信息
原神璃月港ORB_SLAM3测试
【开源】50元低成本DIY三维3D激光雷达点云/二维激光雷达变三维
FAST-LIO加入全局优化,拒绝分层!
基于yolov5的学生行为状态监测系统,openvino加速
SLAM算法源码正确阅读方式
开源!基于RRT的路径规划(ROS C++/Python/Matlab仿真)
实验室里视觉调得再好有屁用,上场头一断啥也不是
SLAM系列之Fast Livo复现(一)
我给母校建了个图--毕设版
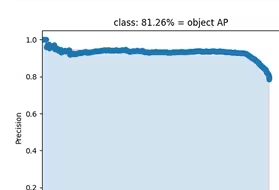
学妹炼的目标检测,这下压力给到控制了
关于我在学校死活做不出来的SDR实验,回家发现天线是断的
Apollo的public road planner C++复现
树莓派5+泰山派开箱
MIT 机器人讲座 —— "SLAM 的过去、现在和未来 | 约翰-霍普金斯保障自主研究所
当RTK和SLAM结合能产生什么化学效应?结尾有惊喜
电赛闭环扫框还是有难度的(香橙派5×STM32H750XBH6)
宇树发布 | Unitree G1 人形智能体 AI化身 ¥9.9万元起
苹果最薄产品!M4 iPad Pro到底怎么样?