V
主页
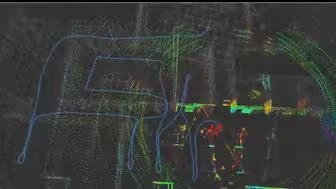
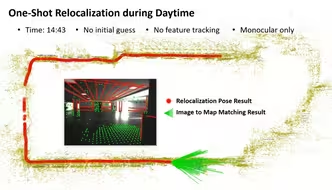
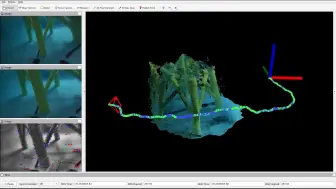
cartographer系统集成-难题探讨-探讨重定位的流程、效率、准确率
发布人
本期视频根据一个高雷同办公室场景的示例,探讨重定位的流程、效率、准确率。 码云的下载地址为:https://gitee.com/slam-xiay/cartographer.git GitHub的下载地址为:https://github.com/slam-xiay/cartographer.git 大家有兴趣可以加微信rich9sir进行探讨。
打开封面
下载高清视频
观看高清视频
视频下载器
cartographer系统集成-平台搭建1
大疆livox-mid360定位
cartographer系统集成-难题探讨-通过概率和运动滤波配置解决脚步残影问题。
张雪峰说的没错,软考系统集成没必要太老实!
cartographer系统集成-4SLAM原理-3消息服务改造
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
大疆livox-mid360室外定位
大学生趁早考个软考吧,真的有用,计算机专业刚毕业,通过系统集成证书,轻松月入8000+
24软考中级又变,出题人不讲武德还又改教材了!|系统集成项目管理工程师
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
软考通过率低都是水分,没上过考场的人第一次机考不就是在送人头吗
嵌入式linux项目,复刻IPhone相机测距功能 ,单目相机+IMU,Vins-mono slam,应用开发,驱动,RK3568,AR
cartographer系统集成教学合集--背景介绍
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
为什么软考通过率这么低,还会有越来越多的人去考系统集成?
cartographer系统集成-3编译优化-3删除metrics
变化场景下的地图在线自更新--地图内较大变化的 case 补充小测
cartographer系统集成-平台搭建2
老板让我明天不用来了,真开心,还给我放一天假
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——高精度】“实测”
cartographer系统集成-3编译优化-4优化3d
cartographer系统集成-3编译优化-8优化pose_graph_interface
每天都跑几圈,机器人底盘,室内slam
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
cartographer系统集成-3编译优化-10优化absl库
存档毕设
软考|24下软考剩三个月不到要考试了,教材又改版了,系统集成该怎么学习?
cartographer系统集成-3编译优化-5优化tsdf等
cartographer系统集成-3编译优化-2模块优化
24下软考报名时间已发布! 软考|软考中级|系统集成|软件设计师|系统规划与管理师|系统架构师
【新版】系统集成项目管理功能工程师-第十一章 规划过程组(6)
阿木SU17在无GPS弱光环境下依靠四目SLAM定位飞行展示
看了十遍广州的入户条件,发现通过软考证书入户是最简单的!!!|系统集成项目管理师
如何为你的jar包上保险,防止别人反编译获取代码,Jar混淆全网最详细教学!!!
重新正常的激光雷达扫图
AMD到底用哪个系统?测试完就知道了
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
cartographer系统集成-3编译优化-9优化lua配置文件
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS