V
主页
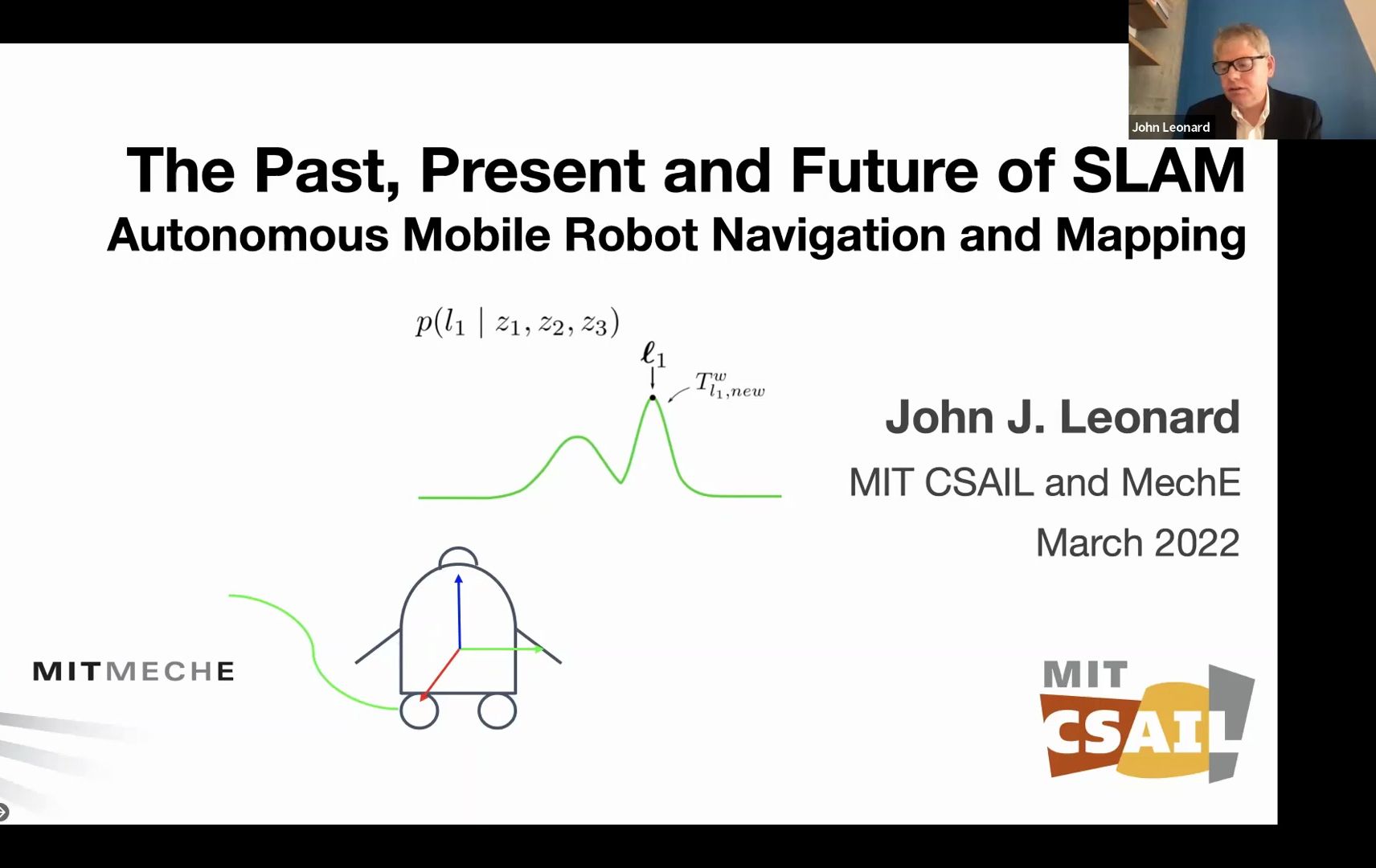
MIT 机器人讲座 —— "SLAM 的过去、现在和未来 | 约翰-霍普金斯保障自主研究所
发布人
转载 应用物理实验室和惠廷工程学院的同事们受邀参加约翰霍普金斯大学保障自主性研究所(IAA)和计算机科学系共同举办的系列讲座的三月份讲座,由国内学者介绍自主性和保障性交叉领域的新研究和发展。 本次讲座的主题是 "SLAM 的过去、现在和未来",主讲人是麻省理工学院机械工程系塞缪尔-C-柯林斯(Samuel C. Collins)机械与海洋工程学教授约翰-伦纳德(John Leonard),他将于 3 月 17 日星期四上午 11 点以虚拟方式发表演讲。 Leonard 博士的摘要和简历附后。该活动对亚太实验室和 JHU 的所有员工、教师和学生开放;请分享! 摘要: 同步定位与绘图(SLAM)是指移动机器人在环境中移动时,通过局部观测构建全局模型的过程。SLAM 是移动机器人的一项基础能力,支持规划、导航和控制等核心功能,适用于广泛的应用领域。SLAM 是移动机器人研究中最深入的领域之一,但要实现稳健、长期的自主性,仍有许多问题有待解决。本讲座将回顾 SLAM 的历史发展,并介绍我们小组当前的几个研究项目。两个关键主题是提高 SLAM 系统中使用的环境模型的表达能力(表示),以及改进用于从数据中估计这些模型的算法的性能(推理)。我们的最终目标是为自主机器人提供对世界更全面的了解,促进其在复杂动态环境中的终身学习。 关于约翰-霍普金斯安全自主研究所: 在亚太实验室和怀廷工程学院的领导下,IAA 正在成为全国公认的自主系统卓越中心,展示约翰霍普金斯大学两个主要部门的强大研究和工作组合,并建立战略性外部合作伙伴关系。国际宇航科学院致力于确保自主系统和人工智能(AI)安全、可靠地融入社会。随着自主系统在物理上和虚拟上的扩散,该研究所力求确保这些系统在运行中的可信度和安全性,能够抵御对手的破坏,并能无缝地融入生态系统和社区。在这个蓬勃发展的领域,JHU 致力于推进自主未来的清晰愿景。
打开封面
下载高清视频
观看高清视频
视频下载器
Xsense离职大佬意外泄漏了公司IMU核心算法代码,这个瓜有点大,快来看看代码吧
强推!2024年最适合初学者入门学习的《机器学习+深度学习+强化学习》上海交大和腾讯强强联合打造!太全面了!
keras之父从谷歌离职 tensorflow彻底败给了pytorch
第五届SLAM论坛高飞报告
【比啃书效果好多了!】不愧是B站最强【麻省理工公开课】深度学习课程,顶级大佬带你恶补人工智能AI专业知识!-AI/人工智能/计算机视觉/MIT/麻省理工深度学习
【太牛啦!】一个合集将机器学习+深度学习+强化学习归纳的如此清晰明了,内容优质且易懂!12个小时让你一次性学个透彻!-机器学习/深度学习/人工智能
多模态还能这么玩?结合小样本学习,一区TOP轻松过收入囊中!
CMU 研究 —— 学习对人形机器人的实时全身遥操作
完爆YOLOv11!Transformer+目标检测新算法性能无敌,狠狠拿捏CV顶会
太完整了!我居然3天时间就掌握了【机器学习+深度学习+强化学习+PyTorch】理论到实战,多亏了这个课程,绝对通俗易懂纯干货分享!
强化学习魅力时刻
喂饭教程!25分钟本地部署Qwen2大模型:配置、微调、部署+效果展示,带你训练自己的行业大模型!
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
ICRA 2024 全部论文及下载方式
这应该是你能找到的讲解最系统全面的【强化学习】教程!北大出身王树森教授从零到一保姆式教学,小白也能很好懂!
【斯坦福计算机视觉课】行业巨头李飞飞的CV课,必看!世界级顶尖水准教学【超清中英双字幕版本】
【强化学习 CS234 2024】斯坦福大学—中英字幕
什么样的人会沦为AI的奴隶?
实时最优控制讲座 —— 最优控制机器人软件
Lec10-1: 强化学习Overview (现代控制、MPC、强化学习的概览)
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
CMU 机器人讲座 —— 模仿学习(IRL)与从人类反馈中学习(RLHF)
图像分割、目标检测、特征提取、边缘检测、图像滤波、人脸识别...终于有人把OpenCV那些必备的知识点讲透彻了!从入门到图像处理实战!
1小时我居然就搞懂了深度强化学习DQN算法及训练!DQN改进与应用技巧,运用神经网络来近似Q值函数,使算法能够在高维状态下运行,深度学习
强化学习底层原理讲解!AI学习如何上下楼梯(深度强化学习)!真的通俗易懂!建议收藏!——(人工智能、深度学习、机器学习算法、神经网络、计算机视觉)
yolov5工创赛圆环识别(11500张数据集)
自由穿梭”小黑屋“SLAM挑战
太厉害了 已跪!终于有人能把知识图谱讲的这么通俗易懂了,浙大知识图谱入门及实战公开课分享!-深度学习丨NLP丨知识图谱
强强联合!GNN+强化学习!刷爆SOTA,霸榜顶会的28个方案
【动手学习大模型 2/12】理解 tokens 和 embedding (有较好基础同学不推荐观看)
深度无监督学习 UC 伯克利 2024 第 2 讲 自回归模型
FAIR(Meta)机器人讲座 —— 机器人灵巧操作(Robotic Dexterous Manipulation)
弱光环境下的SLAM系统
西北大学机器人讲座 —— 机器人学习的控制原理
ChatGPT驱动清洁机器人背后依靠强化学习开源项目
无人机SLAM入门教程(一):课程概述1.3 传感器简介
我在B站上大学!【完整版-麻省理工-微积分重点】全18讲!学数学不看的微积分课程,看完顺滑一整年。_人工智能数学基础/机器学习/微积分/麻省理工/高等数学
8. SLAM系统-上 北邮教授深入浅出三维视觉技术(全网质量最高)