V
主页
【动态系统的建模与分析】2_电路系统建模_基尔霍夫定律
发布人
第二部分,电路系统建模。基尔霍夫定律。 !!!!开始题目中 Eo处电阻为2欧姆!!!
打开封面
下载高清视频
观看高清视频
视频下载器
五万粉丝问答闲话_关于科研与工程,关于考研与就业~~~DR_CAN
【动态系统的建模与分析】4_拉普拉斯变换
【动态系统的建模与分析】6_传递函数(Transfer Function)与拉普拉斯变换
【Advanced控制理论】8_LQR 控制器_状态空间系统Matlab/Simulink建模分析
【动态系统的建模与分析】1_课程介绍
【卡尔曼滤波器】1_递归算法_Recursive Processing
【工程数学基础】3_变声的基础原理_理解卷积的含义_线性时不变系统的冲激响应与卷积
【自动控制原理】8_根轨迹_Part2_根轨迹手绘技巧
【MPC模型预测控制器】1_最优化控制和基本概念
【卡尔曼滤波器】2_数学基础_数据融合_协方差矩阵_状态空间方程_观测器问题
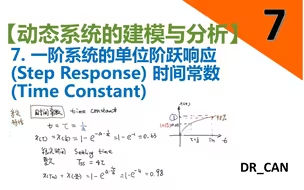
【动态系统的建模与分析】7_一阶系统的单位阶跃响应(Step Response)_时间常数(Time Constant)
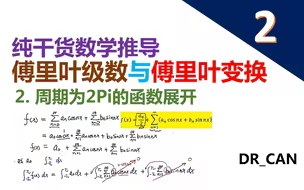
纯干货数学推导_傅里叶级数与傅里叶变换_Part1_三角函数的正交性
【自动控制原理】1_开环系统和闭环系统_反馈控制_Open/Closed Loop System_Feedback
【Advanced控制理论】1_介绍
【自动控制原理】7_根轨迹_Part1_“根”的作用
【动态系统的建模与分析】16_伯德图_手绘技巧与应用_Bode Plot_Part2
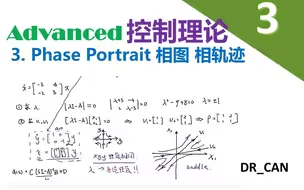
【Advanced控制理论】3_Phase Portrait_相图_相轨迹
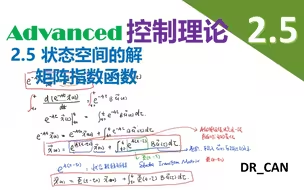
【Advanced控制理论】_2.5_状态空间方程的解_矩阵指数函数
【Advanced控制理论】_3.5_连续系统离散化
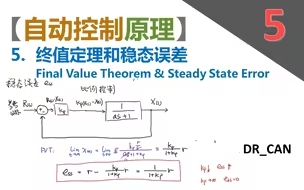
【自动控制原理】5_终值定理和稳态误差_Final Value Theorem & Steady State Error
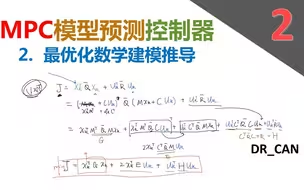
【MPC模型预测控制器】2_最优化数学建模推导
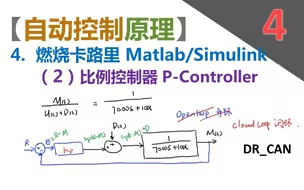
【自动控制原理】4_ 比例控制器_燃烧卡路里(2)_Matlab/Simulink_Proportional Control
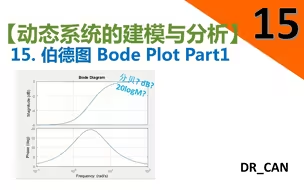
【动态系统的建模与分析】15_伯德图,为什么是20logM?分贝又是什么?_Bode Plot_Part1
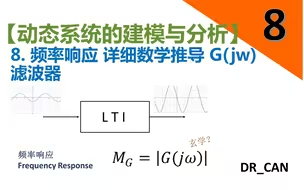
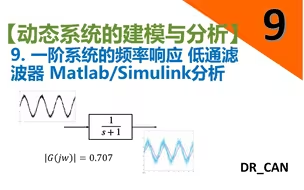
【动态系统的建模与分析】8_频率响应_详细数学推导 G(jw)_滤波器
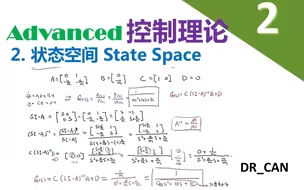
【Advanced控制理论】2_状态空间_State Space
【自动控制原理】3_一起燃烧卡路里/科学减肥(1)_系统分析实例_数学建模部分_Matlab/Simulink
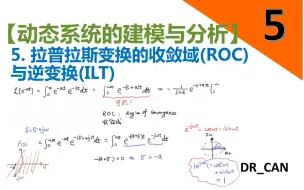
【动态系统的建模与分析】5_拉普拉斯变换的收敛域(ROC)与逆变换(ILT)
【最优控制】1_最优控制问题与性能指标
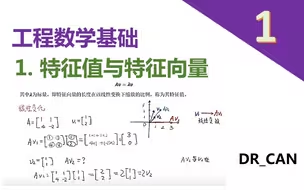
【工程数学基础】1_特征值与特征向量
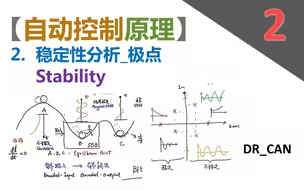
【自动控制原理】2_稳定性分析_极点_Stability
【动态系统的建模与分析】9_一阶系统的频率响应_低通滤波器_Matlab/Simulink分析
【动态系统的建模与分析】_7.5换个角度分析单位阶跃响应_LTI System Unit Step Response
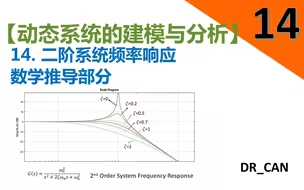
【动态系统的建模与分析】14_二阶系统频率响应_数学推导部分
纯干货数学推导_傅里叶级数与傅里叶变换_Part2_周期为2Pi的函数展开
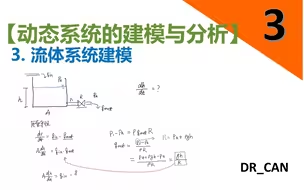
【动态系统的建模与分析】3_流体系统建模
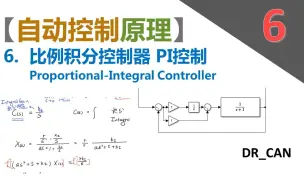
【自动控制原理】6_比例积分控制器_PI控制
DR_CAN视频合计汇总,推荐学习顺序,书籍相关问题
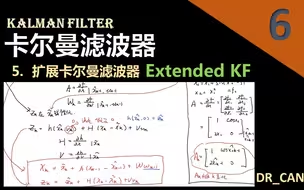
【卡尔曼滤波器】6_扩展卡尔曼滤波器_Extended Kalman Filter
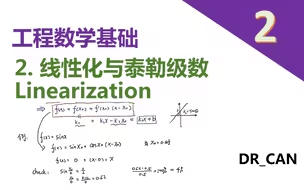
【工程数学基础】2_线性化_泰勒级数_泰勒公式_Linearization
【动态系统的建模与分析】10_二阶系统对初始条件的动态响应_Matlab/Simulink_2nd Order System Response to IC