V
主页
【动态系统的建模与分析】15_伯德图,为什么是20logM?分贝又是什么?_Bode Plot_Part1
发布人
伯德图的第一部分视频。介绍了伯德图和单位分贝(db)的概念。 关于一阶和二阶系统的频率响应的详细数学推导,请参考前面的几期视频。
打开封面
下载高清视频
观看高清视频
视频下载器
卢老师的自控真是永不过时,这段话真是反复停了好多遍,用最简单的话阐述最直接的道理,爱了爱了。
【动态系统的建模与分析】16_伯德图_手绘技巧与应用_Bode Plot_Part2
理解Bode伯德图1——为什么使用Bode图设计控制系统
【动态系统的建模与分析】3_流体系统建模
【动态系统的建模与分析】4_拉普拉斯变换
【动态系统的建模与分析】12_二阶系统的性能分析与比较_科学分析方法
【自动控制原理】12_PID控制器_Matlab/Simulink仿真【开场三分钟闲话】
【动态系统的建模与分析】10_二阶系统对初始条件的动态响应_Matlab/Simulink_2nd Order System Response to IC
【最优控制】1_最优控制问题与性能指标
【中英字幕】Brian Douglas Control Theroy | 自动控制原理
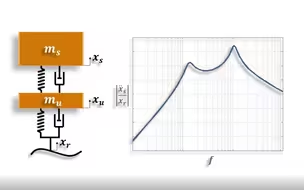
【动态系统的建模与分析】8_频率响应_详细数学推导 G(jw)_滤波器
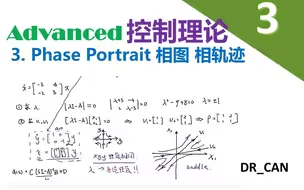
【Advanced控制理论】3_Phase Portrait_相图_相轨迹
【Advanced控制理论】_3.5_连续系统离散化
【Advanced控制理论】16_Nonlinear Adaptive Controller_非线性自适应控制器
理解Bode伯德图2——什么是Bode图
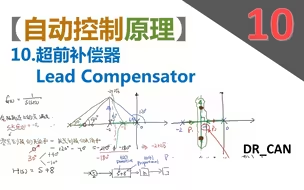
【自动控制原理】10_超前补偿器_Lead Compensator_PD控制器_比例微分控制
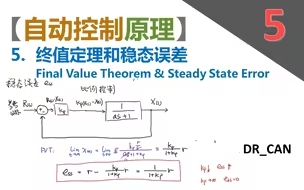
【自动控制原理】5_终值定理和稳态误差_Final Value Theorem & Steady State Error
纯干货数学推导_傅里叶级数与傅里叶变换_Part1_三角函数的正交性
【Advanced控制理论】17_Robust Controller_非线性鲁棒控制器_Sliding Mode_滑模控制
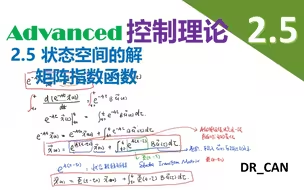
【Advanced控制理论】_2.5_状态空间方程的解_矩阵指数函数
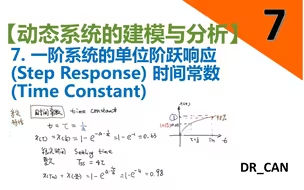
【动态系统的建模与分析】7_一阶系统的单位阶跃响应(Step Response)_时间常数(Time Constant)
【最优控制】7_轨迹追踪(1)- 目标误差控制
【自动控制原理】1_开环系统和闭环系统_反馈控制_Open/Closed Loop System_Feedback
电化学bode图的拟合
【动态系统的建模与分析】1_课程介绍
Bode图判稳
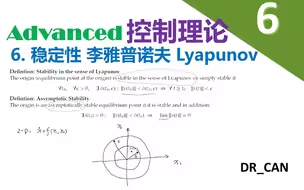
【Advanced控制理论】6_稳定性_李雅普诺夫_Lyapunov
【动态系统的建模与分析】11_二阶系统的单位阶跃响应_详细数学推导部分_2nd order system unit step response
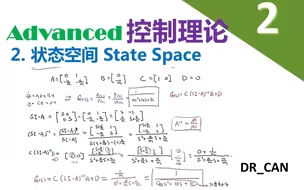
【Advanced控制理论】2_状态空间_State Space
【卡尔曼滤波器】2_数学基础_数据融合_协方差矩阵_状态空间方程_观测器问题
7电流闭环框图和bode图分析
【工程数学基础】7_复数有三种表达,你知道么?
【卡尔曼滤波器】1_递归算法_Recursive Processing
【动态系统的建模与分析】6_传递函数(Transfer Function)与拉普拉斯变换
【Advanced控制理论】20_非线性控制理论串讲+闲话
【自动控制原理】3_一起燃烧卡路里/科学减肥(1)_系统分析实例_数学建模部分_Matlab/Simulink
【动态系统的建模与分析】14_二阶系统频率响应_数学推导部分
【自动控制原理】13_奈奎斯特稳定性判据_Nyquist Stability Criterion_Part 1
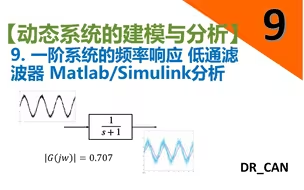
【动态系统的建模与分析】9_一阶系统的频率响应_低通滤波器_Matlab/Simulink分析
【自动控制原理】7_根轨迹_Part1_“根”的作用