V
主页
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
发布人
张清文 (https://kin-zhang.github.io/),瑞典皇家理工学院博士在读,主要研究方向为激光雷达中的动态感知。开源了点云地图中动态障碍物去除基准框架,包含五个对比方法,四个不同传感器类型数据集等,未来还会不断增加更新,新的方案,这次介绍的工作是基于LiDAR的建图后动态点云的去除问题。相关论文 A Dynamic Points Removal Benchmark in Point Cloud Maps,DUFOMap: Efficient Dynamic Awareness Mapping等投稿至会议 ITSC和 期刊RA-L
打开封面
下载高清视频
观看高清视频
视频下载器
点云地图动态障碍物去除
地图动态障碍物去除总结 ITSC'23: A Dynamic Points Removal Benchmark in Point Cloud Maps
灵光K1正式发布——不到1kg的三维扫描建模设备,实时真彩实时建模
【自记录】到瑞典第二周遇到的囧时刻 全程闲聊 没啥知识含量
瑞典留学/工作 所有身份证件事项办理时间轴参考 【包含 人口号 人口卡 银行卡 Bankid
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
【记录】KTH博士新生大礼包开箱
EVI-SAM:基于单目事件相机的稠密三维重建
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
东北大学全场景点云地图
【自记录】七八月生活记录 瑞典全年最美好的两个月 做饭吃饭运动喝酒日落
欧洲留学行李携带建议系列[2] 衣物系列
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
【教程】OpenPCDet 部署运行及ROS版本扩展 由 LiDAR 快速出检测框给到下游任务使用
【自制中英】宾夕法尼亚大学机器人专项课程一 空中机器人 - Robotics: Aerial Robotics
【自记录】瑞典KTH博士生活 三月记录 穿梭瑞典上课 再次滑雪 干活
【自记录】北欧瑞典KTH博士新同学 第一周记录 从上海出发开始 初次见面 hi
世界一流的人形机器人,北理工团队!
欧洲岗位制博士申请 回答网友问题 面试经验记录
瑞典留学的生活消费支出详细介绍
无人机在动态杂乱环境中的快速自适应感知和规划
【自记录】瑞典KTH博士生活 四五月记录 撸猫大合集 春天来啦 投了论文
论文写作之矢量图输出(ppt制作框图并无损输出pdf到latex进行嵌入)
北欧博士申请 投递到面试 详细完整流程梳理 介绍及相关经验
自动驾驶算法工程师入职五个月的所见所闻所感
帝国理工学院最新发布!高斯抛雪球SLAM
【自记录】六月荷兰游 欧洲小镇闲游 参加Ebru婚礼 留下夏天的彩虹啦
【实验室】大学最后时光
【教程】Quickly-CARLA 自动驾驶开源仿真器介绍 及 UP主开发的小调试GUI工具
【TPAMI2023】上海交通大学邹丹平团队重磅开源TextSLAM算法、数据集、测评工具 (TextSLAM Outdoor night test)
【人物 | 何恺明】多篇顶会最佳论文,ICCV 2017拿下双最佳论文【计算机科学】
欧洲留学行李携带建议系列[1] 电子设备
腾讯新发布|多摄像头视觉惯性SLAM,有效地增强快速旋转运动!
宾夕法尼亚大学GRASP发布:3D主动度量语义SLAM
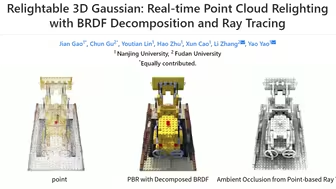
[3DGS进展] 南京大学、复旦大学提出Relightable 3DGS,基于点的可微分渲染,从多视图中进行材质和照明分解,实现3D点云的编辑、光线追踪和重照明
FastLio 重定位 室内导航
港大等联合开源F2-Nerf!任意轨迹输入,训练只需几分钟!
台湾电竞赛事邀涉毒人员颁奖,获奖选手怒呛:贩毒狗!“贩毒就该乖乖接受审判,来这里干嘛”
恺明大佬问答环节:AI自动驾驶可靠吗?
NVIDIA AI资深研究科学家Jim Fan