V
主页
京东 11.11 红包
【直播回放】2022届秋招面试心路历程分享:SLAM方向
发布人
直播嘉宾:王同学,211硕,已经拿了旷视、格灵深瞳、比亚迪、智行者等多家大厂的SLAM算法岗offer。 更多内容请进SLAM/3D视觉知识星球学习! 课程官网:cvlife.net
打开封面
下载高清视频
观看高清视频
视频下载器
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
2021年度盘点:十大最佳开源SLAM算法!
【直播回放】SLAM常见面试问题浅析
哈工大博士分享:基于Gaussian Splatting的SLAM新发展与新论文(上)
ETHZ开源|可与任何VIO前端兼容的SLAM通用后端!
【开源】基于激光点云的无监督类无关实例分割算法,RAL22!
【六哥答疑】多传感器融合SLAM如何开始研究呢?有哪些研究方向?
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
【即将开源】DM-VIO:仅单个相机和IMU优于双目惯性方法!RA-L
2022年度盘点:优秀SLAM开源方案
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
【SLAM前沿讲座】Tim Barfoot |机器学习在哪里可以帮助机器人进行状态估计?
【六哥答疑】哪些相机比较适合做SLAM?
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
效率提高24%,突破功率受限!机器人的室内高效三维探索!宾夕法尼亚大学最新发布
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
ICRA2022|CMU动态视觉SLAM新思路!用移动对象来改进相机姿态估计,绝绝子!
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
CMU最新发布|不同环境下机器狗的360°相机定位,能自动规避障碍物,快速又准确!
【最新技术】ANYmal C 机器人自主探索地下矿井
公开课 | 无人机实时及快速地图重建
太刑了!人脸编辑,风格可自由转换!UIUC&腾讯&清华等最新研究FENeRF!CVPR2022
ICRA2022|首尔大学发布基于物体的矩阵李群视觉惯性导航系统!
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
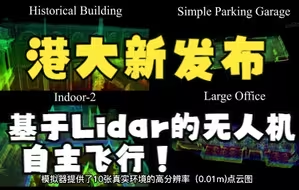
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
这个数据集真强!地下隧道、不同照明等情况下,多机器人视觉SLAM!MIT等最新开源!
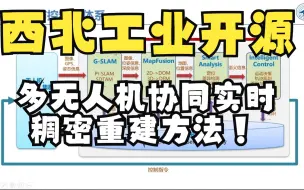
西北工大开源DenseFusion:多无人机协同实时稠密重建方法!
立体匹配算法原理与应用-奥比中光
【最新开源】ECCV2022|美女秀发随风飘动,发丝抠图一点不差!延世大学&Adobe新研究
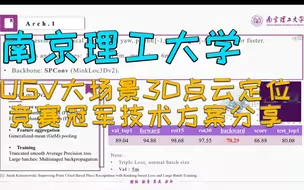
CMU & ICRA22 UGV大场景3D点云定位竞赛冠军技术方案分享|南京理工大学
三本应届生,广州7k真实面试录音,逐字逐句分析,找到问题所在
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
哈工大发布|首个基于线特征的红外惯性里程计ETIO,性能超过了最先进的TIO!
【直播回放】视觉几何三维重建学习心得分享及作业讲解
99%的Python程序员都没学过这个功能?
苏黎世皇家理工等发布!带闭环稠密神经SLAM