V
主页
接触寻位仿真
发布人
发那科机器人焊丝接触寻位仿真
打开封面
下载高清视频
观看高清视频
视频下载器
发那科机器人带外部轴接触寻位焊接仿真
创建一个简单的焊接程序
04ROBOGUIDE弧焊摆焊功能教程
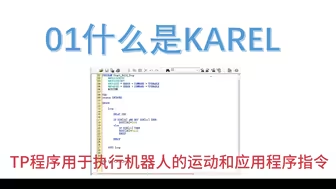
发那科karel版本的起保停程序
发那科机器人动态补偿位置仿真
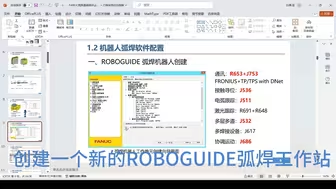
01如何创建ROBOGUIDE弧焊工作站
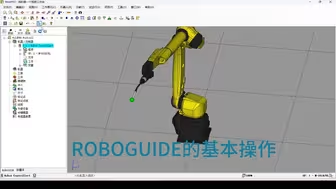
02ROBOGUIDE的基本操作
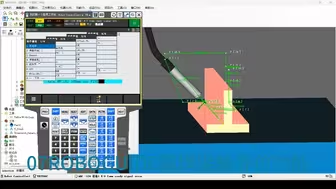
03ROBOGUIDE弧焊机器人示教编程
07ROBOGUIDE弧焊接触寻位功能
01什么是KAREL01
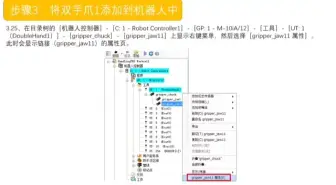
roboguide可动抓手仿真教程
发那科机器人协同焊接Roboguide仿真教程
发那科ROBOGUIDE复原DELFOI工作站直播录像
05ROBOGUIDE弧焊电弧跟踪
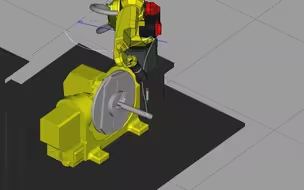
FANUC机器人协同变位机焊接
06ROBOGUIDE弧焊多层多道功能
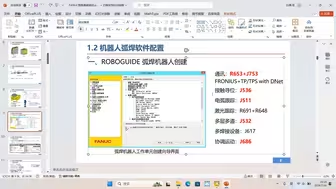
发那科弧焊基础培训——1机器人弧焊系统说明
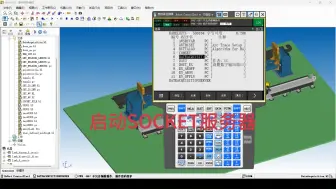
KAREL应用之SOCKET数据采集
KAREL入门教程
CST仿真超表面
机器人运动学拙见
PNS程序远程启动仿真
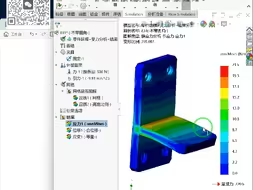
【SolidWorks Simulation付费训练营回放】第2天:Simulation接触与高级夹具设定问题
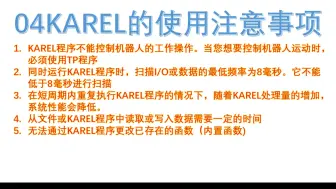
04KAREL的使用注意事项04
FANUC机器人协同焊接ROBOGUIDE仿真教程
发那科机器人用户坐标系标定算法
FANUC机器人标定教学
不一样的离线仿真
KISSSOFT2022渐开线圆柱齿轮副齿轮设计——第六讲:kisssoft齿轮强度模块计算齿根弯曲齿面接触点蚀疲劳胶合ISO6336
02KAREL的特性02
双向强耦合+接触(原创)
COMSOL深度神经网络学习-模型预测-代理模型训练
DELFOI离线编程欣赏#交流+331356714
fluent 旋转动网格和旋转UDF
tabbed routing传输线建模仿真
【教程】Multisim仿真快速入门
【SolidWorks Simulation付费训练营回放】第1天:Simulation有限元仿真通用技术流程
985学长分享【abaqus中cohesive与摩擦接触同时设置的建模方法】
电力电子电路仿真教学-Matlab/Simulink仿真教程-双向拓扑-交错BuckBoost+三相交错CLLLC
发那科机器人世界坐标系原点在哪