V
主页
京东 11.11 红包
FANUC机器人标定教学
发布人
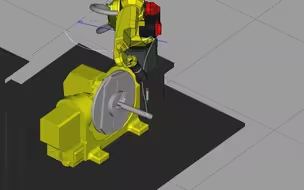
发那科焊接机器人TCP标定方法介绍
打开封面
下载高清视频
观看高清视频
视频下载器
发那科机器人用户坐标系标定算法
03ROBOGUIDE弧焊机器人示教编程
FANUC机器人协同变位机焊接
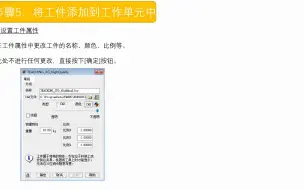
发那科机器人如何用ROBOGUIDE进行文件导入导出操作
发那科机器人协同焊接Roboguide仿真教程
发那科机器人世界坐标系原点在哪
不一样的离线仿真
FANUC机器人协同焊接ROBOGUIDE仿真教程
机器人运动学拙见
1.1 FANUC发那科-官方工程师培训1《机器人介绍+仿真软件操作+机器人基本操作(上)》
你真的了解机器人坐标系吗
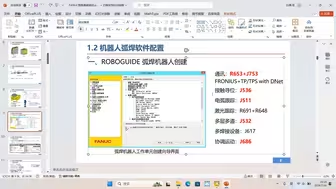
发那科弧焊基础培训——1机器人弧焊系统说明
05我的第一个KAREL程序05
02ROBOGUIDE的基本操作
发那科机器人带外部轴接触寻位焊接仿真
05ROBOGUIDE弧焊电弧跟踪
发那科机器人动态补偿位置仿真
接触寻位仿真
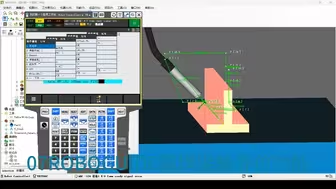
创建一个简单的焊接程序
DELFOI离线编程欣赏#交流+331356714
01什么是KAREL01
06ROBOGUIDE弧焊多层多道功能
PNS程序远程启动仿真
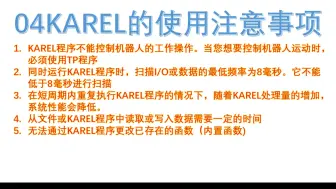
04KAREL的使用注意事项04
03KAREL能做什么03
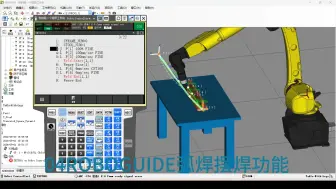
04ROBOGUIDE弧焊摆焊功能教程
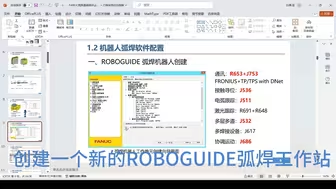
01如何创建ROBOGUIDE弧焊工作站
发那科karel版本的起保停程序
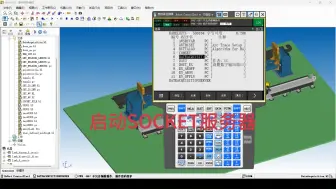
KAREL应用之SOCKET数据采集
02KAREL的特性02
【长沙阿布】最新视频已上线,快来围观!
DELFOI创建焊接变位机组件教程
主轴电机异响振动排查思路
DELFOI组件创建之焊枪创建
KAREL入门教程
DELFOI弧焊离线编程教程00前言
07ROBOGUIDE弧焊接触寻位功能
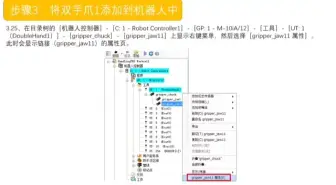
roboguide可动抓手仿真教程
6轴机械臂逆运动仿真——MATLAB
VR焊接机器人