V
主页
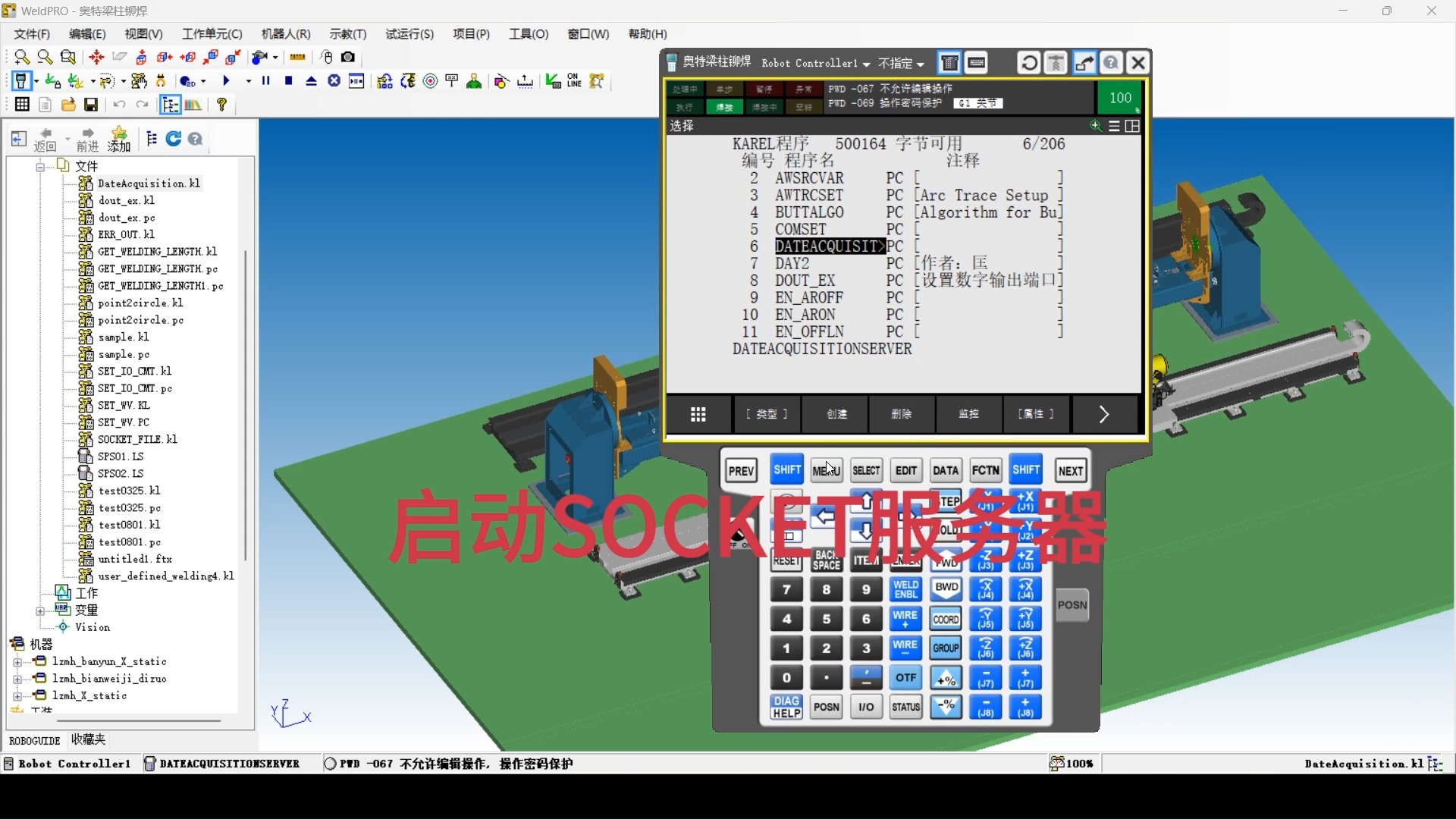
KAREL应用之SOCKET数据采集
发布人
KAREL应用之SOCKET数据采集
打开封面
下载高清视频
观看高清视频
视频下载器
接触寻位仿真
01什么是KAREL01
发那科机器人动态补偿位置仿真
创建一个简单的焊接程序
发那科karel版本的起保停程序
KAREL入门教程
WeChat_20231009190321
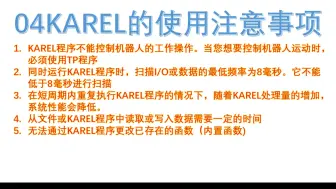
04KAREL的使用注意事项04
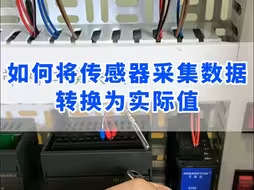
如何将传感器采集数据转换为工程量的值?
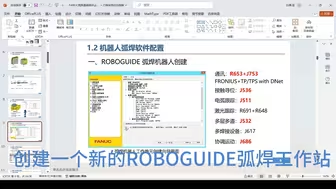
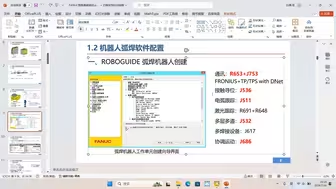
01如何创建ROBOGUIDE弧焊工作站
05我的第一个KAREL程序05
第十九期:示教点偏移
一款可以躺平的爬虫软件,可视化操作不需要任何代码
端到端数据采集
发那科机器人协同焊接Roboguide仿真教程
FANUC机器人标定教学
闲鱼APP逆向^md5加密分析^商品数据采集|Python爬虫进阶教程
FANUC机器人协同焊接ROBOGUIDE仿真教程
车灯亮度是怎么得到的,带你看数据采集现场
发那科机器人用户坐标系标定算法
03KAREL能做什么03
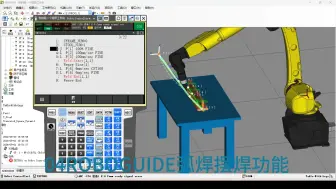
07ROBOGUIDE弧焊接触寻位功能
发那科机器人世界坐标系原点在哪
第十八期:工具偏移
A_16位8通道同步采样模数数据采集模块-AD7606模块介绍
Python爬虫|京东h5st算法构成分析,批量采集商品商家数据
发那科弧焊基础培训——1机器人弧焊系统说明
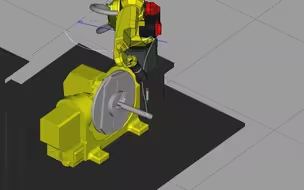
FANUC机器人协同变位机焊接
基于STM32的数据采集+心率检测仪(源码+原理图PCB+论文)
05ROBOGUIDE弧焊电弧跟踪
第二十期:回机器人本体原点
04ROBOGUIDE弧焊摆焊功能教程
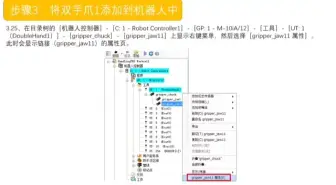
roboguide可动抓手仿真教程
采集PLC数据并通过加密的方式上传到用户自己的平台
03ROBOGUIDE弧焊机器人示教编程
02KAREL的特性02
Fanuc发那科机床工件计数功能
B_逐行详解基于Verilog的AD7606驱动代码
06ROBOGUIDE弧焊多层多道功能
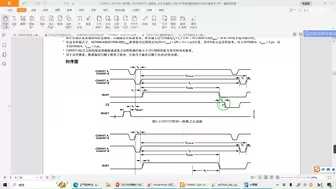
PNS程序远程启动仿真