V
主页
京东 11.11 红包
GNSS拒止下无人机视觉地理定位(n)
发布人
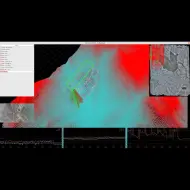
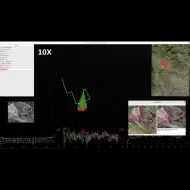
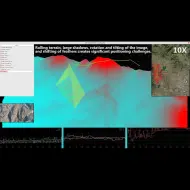
我们开发了一种结合影像匹配、视觉里程计和地形约束的视觉定位系统,该系统使用互联网公开卫星地图和DEM数据,无需高度计和IMU等设备,不受信号干扰,不需回环校正,误差不会积累,定位失败后可以进行重定位。而且该系统对地形起伏、影像倾斜和旋转及航高变化、复杂航线都具有适应性,不需要相机镜头严格向下拍照,对季节、光照变化等有一定的鲁棒性。我们利用平原、丘陵山地及城市、农村区域,多航线、多视角、跨季节天气、热红外等20个复杂场景情况数据,详尽的验证了系统的鲁棒性和精度。实验结果表明,我们的系统在纯视觉条件下完成了高空、长距、大范围、高精度的白天和夜间GNSS拒止定位,定位精度和GPS相当,在GNSS拒止情况下,可作为GNSS的有力补充。 https://github.com/YFS90/GNSS-Denied-UAV-Geolocalization
打开封面
下载高清视频
观看高清视频
视频下载器
GNSS拒止下无人机视觉地理定位(p)
GNSS拒止下无人机视觉地理定位(l)
GNSS拒止下无人机视觉地理定位(d)
GNSS拒止下无人机视觉地理定位(j)
GNSS拒止下无人机视觉地理定位(g)
做着玩儿的光流小飞机室内飞行
GNSS拒止下无人机视觉地理定位(e)
GNSS拒止下无人机视觉地理定位(f)
GNSS拒止下无人机视觉地理定位(h)
GNSS拒止下无人机视觉地理定位(r)
经典视觉SLAM-ORB_SLAM3效果(单目)研一小白记录
GNSS拒止下无人机视觉地理定位(s)
GNSS拒止下无人机视觉地理定位(q)
轨道车辆激光LIO测试
GNSS拒止下无人机视觉地理定位(i)
GNSS拒止下无人机视觉地理定位(m)
卡尔曼滤波实现目标跟踪,不到一小时轻松学会!
歼20的“忠诚僚机”飞鸿97A,是个怎样的存在?
未知环境探索——ROS2树莓派小车实时地图构建和导航
GNSS拒止下无人机视觉地理定位(k)
反光柱定位算法-重复定位精度测量(实测重复定位数据1cm以内)
穷鬼大学生怒肝720小时!从底层到算法自制激光雷达+IMU融合的自主导航小车震撼演示
手持旋转扫描仪构图测试(alpha_lidar)
马里奥麦克纳姆轮小车及其室内视觉定位 【AI配音】
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
绝密魔改版ORB-SLAM——新算子+图像预处理
【3D点云+三维重建】最好出论文的研究方向,博导带你从零解读两大方向的核心算法PointNet与NeuralRecon!赶紧收藏
行为识别实战:手把手带你从零到入门行为识别项目,算法详解+代码精讲,究极通俗易懂!
slamer手搓一个华强北空间屏
花了一个学期打造的初代建图导航坤,结果竟然这样……(上上学期)
无GPS也能稳定飞行?阿木SU17视觉定位多场景飞行测试
纯反光柱定位算法进阶版
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
其域创新2024年新品发布会
YOLOv5零基础入门!博导耗时10小时精讲YOLOv5从环境配置到项目实战,带你快速训练自己的数据集!
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
凌启科技视觉定位模块LQ-S01定点效果--杂草丛
【组会救星】CVPR 2024 目标检测领域重大突破!
致敬传奇:MAN,What can I say!