V
主页
哈佛大学软体机器人工具箱介绍
发布人
这是我的硕导哈佛大学研究院Donal Holland开发和维护的软体机器人工具箱:https://softroboticstoolkit.com/ 我之后会在我的平台持续推出这个网站的所有教学视频~敬请期待~
打开封面
下载高清视频
观看高清视频
视频下载器
#我们组的连续体机器人#
使用有限元方法仿真对软体机器人的运动建模和操纵控制
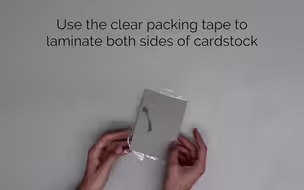
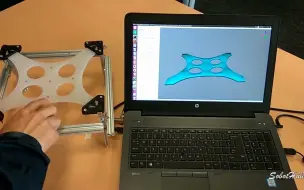
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):纺织硅胶混合传感器教程(Textile Silicone Hybrid Sensor)
各向异性材料软体机器人的设计和模拟
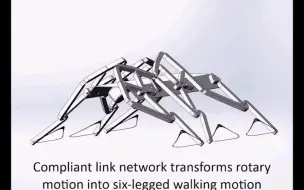
软体机器人学习爬行:一个基于有限元模拟的优化框架的设计与控制方法
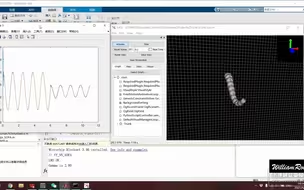
基于有限元方法建模的软体蛇形机器人控制(牛逼版本)
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit): 软抓手教程(Soft Gripper Tutorial)
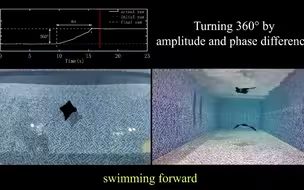
西工大仿生蝠鲼团队1m翼展蝠鲼样机实验
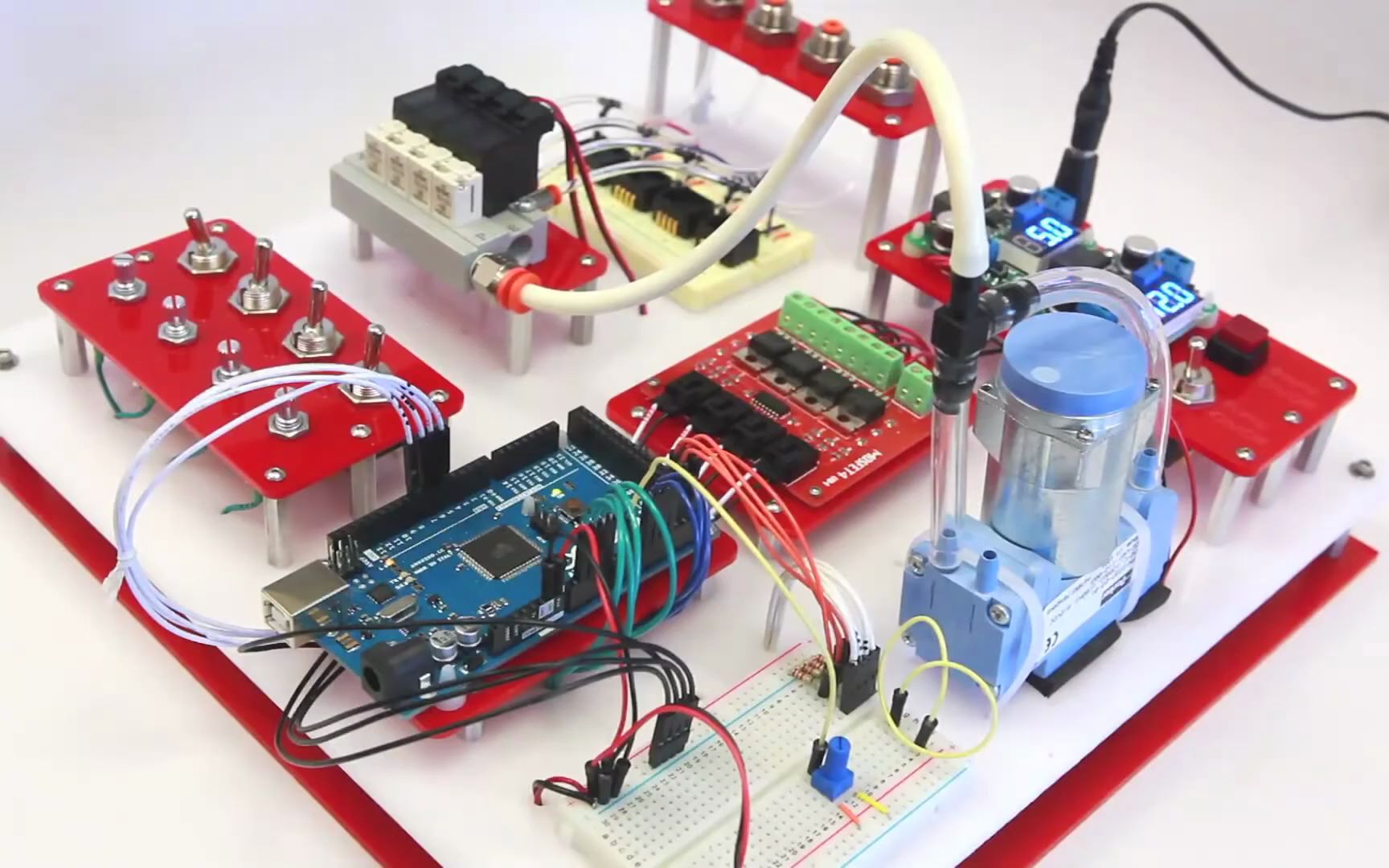
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):气动腕带教程(Pneumatic Wrist Brace Tutorial)
软体蛇形机器人的有限元建模增益调度控制
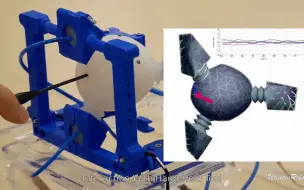
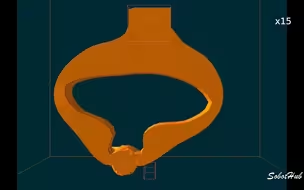
用于适应性干预的仿生活性前列腺模型(医疗软体机器人模拟及应用)
基于有限元模型的蛇形机器人轨迹追踪控制
SOFA Framework 软体机器人建模起步教程
使用SOFA Framework对软体机器人模拟的总体思路
Nature communications 可受控快速连续转向跳跃的无腿软体机器人 (重庆大学机械工程学院陈锐老师团队)
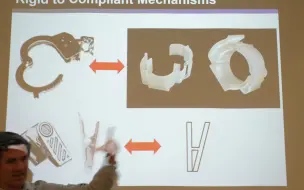
柔性机构学几个热点研究方向(up主持续更新加强版 建议收藏)
Sofia步行机器人的有限元仿真与实验实现
超变态的AI换脸工具,解除限制!解锁高级功能!
基于有限元法的软体蛇形机器人非线性控制器
软体抓手的自动协同设计和抓取控制策略
用于机器人控制的逆实时有限元模拟:灵活的针头插入可变形组织
基于有限元分析对软体机器人进行几何形状优化
SOFA Framework 软体机器人模拟器 Demo 1
当魔术遇上软体机器人会发生什么?
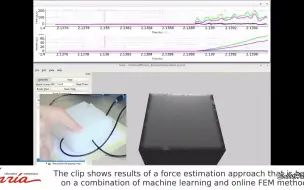
在有限元方法框架下基于视觉感知作用在软机器人上的所受外力
软体蛇形机器人概念设计性的人机交互尝试
SOFA Framework与Matlab交互模拟(基于有限元方法控制器设计)
从自然到工业,一键解锁仿生设计的无限可能!
基于cosserat模型的滚动时域估计和模型估计控制
SOFA Framework和ROS的连接使用
基于有限元分析建模和优化框架下的处理软体机器人接触问题
多旋翼无人机基于图像的视觉伺服精确拦截飞行目标
堆塑
SOFA Framework和Unity3D的结合
最近不更新是up主太忙了,手上正在进行的科研工作大概有10篇左右机器人学的顶刊和tier 1期刊(包括中科院一区,一个月一篇得写和投,解决领域内的问题,但没有…
柔顺机构学 Lecture 9 Part 7
一些精妙的 Origami 折纸结构
模拟基于气流测量的新型软机械传感器
柔顺机构学 Lecture 1 Part 3
全网最强AI去马赛克工具,马赛克再见!【Git源宝】