V
主页
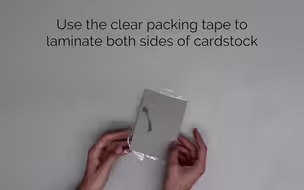
模拟基于气流测量的新型软机械传感器
发布人
这是我博士课题组博后Stefan Escaida Navarro的工作(Modeling Novel Soft Mechanosensors Based on Air-Flow Measurements),该工作还现场展示于2019年在巴黎举行的SOFA week。基于气体流动或者压强改变的传感器可能是基于弹性体形变传感的另一条新思路~ PDF链接附上: https://hal.inria.fr/hal-02239080/document
打开封面
下载高清视频
观看高清视频
视频下载器
#我们组的连续体机器人#
使用有限元方法仿真对软体机器人的运动建模和操纵控制
基于有限元方法建模的软体蛇形机器人控制(牛逼版本)
基于柔性脊柱的可变形机械手的设计实验与控制
Sofia步行机器人的有限元仿真与实验实现
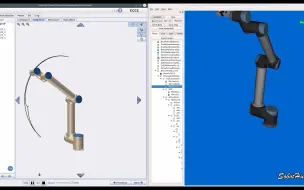
基于有限元分析方法的连续体机器人的运动学和闭环控制
SOFA Framework 软体机器人建模起步教程
人工耳蜗手术的有限元方法数值模拟
软体机器人基于模型控制处理接触问题(模型实时控制)
SOFA Framework与Matlab交互模拟(基于有限元方法控制器设计)
使用SOFA Framework模拟哈佛多步态软体机器人
基于有限元分析对软体机器人进行几何形状优化
#你看过软体机器人玩迷宫游戏么#
用于机器人控制的逆实时有限元模拟:灵活的针头插入可变形组织
哈佛大学软体机器人工具箱介绍
SOFA Framework和ROS的连接使用
用于软机器人中的力和形状估计的基于有限元模型的传感器方法
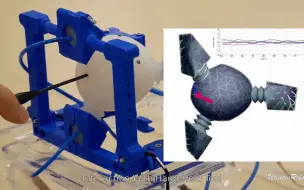
基于cosserat模型的滚动时域估计和模型估计控制
SOFA Framework 软体机器人模拟器 Demo 1
软体机器人学习爬行:一个基于有限元模拟的优化框架的设计与控制方法
软体抓手的自动协同设计和抓取控制策略
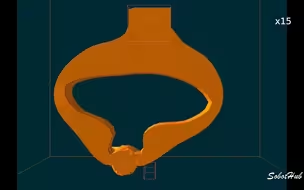
用于适应性干预的仿生活性前列腺模型(医疗软体机器人模拟及应用)
软体蛇形机器人的有限元建模增益调度控制
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):纺织硅胶混合传感器教程(Textile Silicone Hybrid Sensor)
基于有限元模型的蛇形机器人轨迹追踪控制
基于有限元法的软体蛇形机器人非线性控制器
当魔术遇上软体机器人会发生什么?
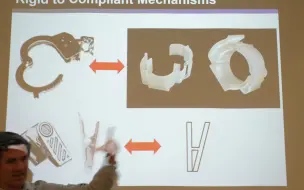
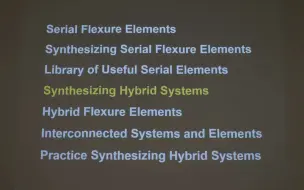
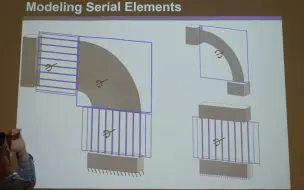
柔顺机构学 Lecture 9 Part 7
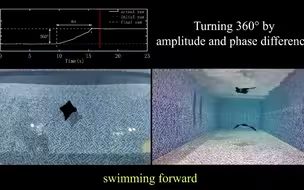
西工大仿生蝠鲼团队1m翼展蝠鲼样机实验
柔顺机构学 Lecture 1 Part 3
柔顺机构学 Lecture Series 先导介绍
新型自研柔性线材织物传感器、感应垫一可应用于离床监测、养老看护、防碰撞、防褥疮垫、宠物垫、智能穿戴等,可定制
传感器与检测技术重点整理,期末95+不用愁!
#当魔术遇上仿生机器人#
柔顺机构学 Lecture 9 Part 5
玩传感器有好方法
柔顺机构学 Lecture 9 Part 3
柔顺机构学 Lecture 6 Part 5
柔顺机构学 Lecture 4 Part 6
柔顺机构学 Lecture 6 Part 7