V
主页
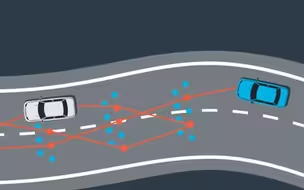
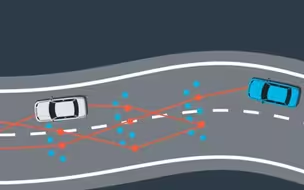
自动驾驶决策规划算法第二章第四节(下) 二次规划代码实践
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶决策规划第二章第五节 路径规划总结与疑难解答
自动驾驶决策规划算法第二章第三节(下) 动态规划代码实践
自动驾驶决策规划算法第二章第四节(中) 路径二次规划算法
自动驾驶决策规划算法第二章第四节(上) 轻决策与重决策
借用你23秒,来体会下无人驾驶网约车倾巢而出的震撼感!
自动驾驶决策规划算法第二章第七节(下) 速度规划代码实践(第二章完结)
奥迪的灯不应该很大吗?
自动驾驶决策规划算法第二章第三节(上) 路径决策算法:动态规划
自动驾驶决策规划算法序章 总纲与大致目录
自动驾驶决策规划算法第二章第七节(上) 速度规划详解:SL与ST迭代
自动驾驶决策规划算法第二章第一节 决策规划仿真平台搭建
自动驾驶决策规划算法第一章第一节 细说五次多项式
自动驾驶决策规划算法第三章第一节 Apollo em motion planner 论文详解
自动驾驶决策规划算法预告
自动驾驶决策规划算法第二章第二节(中) 参考线算法
自动驾驶决策规划算法二章第六节 ST图与迭代优化
自动驾驶决策规划算法第三章第二节 决策规划展望(完结)
自动驾驶决策规划算法第二章第三节(中) 控制接口,轨迹拼接
自动驾驶决策规划算法第二章第七节(中) 速度规划算法实践详解
自动驾驶决策规划算法第二章第二节(下) 参考线代码实践
无人驾驶萝卜快跑投入武汉市场后,好消息:超雄司机少了,坏消息:超雄才乘客变多了!机器学习|深度学习|计算机视觉
自动驾驶决策规划算法第一章第二节 凸优化与非凸优化
自动驾驶决策规划算法第一章第三节(上) 直角坐标与自然坐标转换
自动驾驶决策规划算法第一章第三节(下) 直角坐标与自然坐标转换
自动驾驶决策规划算法第二章第二节(上) 参考线模块
亲身体验后,我觉得萝卜快跑不太行,百度就是个为王前驱的命
【基础】自动驾驶控制算法第四讲 坐标变换与横向误差微分方程
【基础】自动驾驶控制算法第一讲 绪论与前期准备
【基础】自动驾驶控制算法第八讲(三) 代码与模型
火爆全网!无人驾驶萝卜快跑投入武汉市场后,【好消息】:超雄司机少了,【坏消息】:超雄才乘客变多了!机器学习|深度学习|计算机视觉
实习Vlog | 高薪公司?养猪厂?00后来苏州Momenta入职第一天,感觉咋样?
【基础】自动驾驶控制算法第十一讲 纵向双pid控制
【基础】自动驾驶控制算法第十讲 油门刹车标定表的制作
【基础】自动驾驶控制算法第七讲 离散规划轨迹的误差计算
无人车要普及了 多少人下岗了呢
“萝卜快跑”迎来了“史上最强对手”
【基础】自动驾驶控制算法第二讲 三个坐标系与运动学方程
司机全都失业?打一辆无人驾驶网约车实测!
马斯克痴迷于特斯拉4680电池研发历程
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合