V
主页
【无人机】MAVLink3进度更新 | 暂时不会有MAVLink3了 | 由Lorenz Meier讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
发布人
https://video.ethz.ch/events/2019/px4_developer_summit/992b369d-1c54-4c93-b61f-562742bc6ce7.html MAVLink3 Update 由Lorenz Meier讲解MAVLink新进展
打开封面
下载高清视频
观看高清视频
视频下载器
【无人机】UAVCAN:用于硬实时航空器网络的高可靠发布订阅协议 | 由Pavel Kirienko和Scott Dixon讲解 | PX4开发者峰会2019
【无人机】Pixhawk硬件标准更新(FMUv5x) | 由Pixhawk/PX4创始人Lorenz Meier讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【无人机】PX4软件在环仿真(SITL)改进与ROS集成 | 由ROS平台经理Tully Foote讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】PX4飞控的过去现在和未来 | 由PX4创始人Lorenz Meier博士讲解 | PX4开发者峰会@ETH苏黎世联邦理工大学
【无人机】硬错误调试HardFault Debugging | 由David Sidrane讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【无人机】使用MAVSDK通过MAVLink控制无人机 | 由MAVSDK维护者Jonas Vautherin讲解 | PX4开发者峰会@ETH苏黎世联邦理工
【PX4开源飞控无人机】入门教学:在Linux(Ubuntu)上安装搭建PX4开发环境 | Brian Philips
【PX4开源飞控无人机】MAVROS Python使用教程(一):安装与基本设置 | Farhang Naderi
【无人机】ROS2为PX4增添新动力 | 由Nuno Marques讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【开源飞控】Pixhawk:无人机上的社区驱动的开源标准 | 创始人Lorenz Meier与核心开发者们 | PX4线上开发者峰会2020·直播录像
【开源无人机】从零调试一架开源无人机M0-F250
【PX4开源飞控无人机】将micro-ROS引入基于PX4的飞行系统 | Jaime Martin-Losa | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】PX4状态估计更新2021 | Paul Riseborough | PX4线上开发者峰会2020
【零基础无人机组装教学】Pixhawk4飞控+Tarot机架从组装到试飞视频
【PX4开源无人机】软件在环仿真(SITL)的配置和开发流程 | Jaeyoung Lim | PX4线上开发者峰会2020
【PX4开源飞控无人机】MAVROS Python使用教程(二):通过一段代码执行简易任务与指引飞行 | Farhang Naderi
【无人机】VTOL垂起无人机控制与空速错误检测 | 由Roman Bapst讲解 | PX4开发者峰会2019
【开源无人机】室内款低成本无人机M0-F250介绍及代码讲解(源码资源链接在简介)
【无人机】计算机视觉前瞻 | 研讨会 | 由Julian Kent与Lorenz Meier主持 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【开源无人机】ROS无人机编队代码讲解
【无人机】PX4飞行任务架构 | 由Dennis Mannhart与Matthias Grob讲解 | PX4开发者峰会2019@ETH苏黎世联邦理工大学
【PX4开源飞控无人机】GE的高级载具动力学仿真的开源工作流程 | Matt Vacanti · Jesse Hoskins | PX4线上开发者峰会2020
Pixhawk4+Tarot650机架测试飞行与航拍基本操作
【无人机】Dshot MultiShot OneShot PWM是什么以及优缺点 | 电调通讯协议解读 - PART 1 | Joshua Bardwell
【PX4开源飞控无人机】为MAVSDK扩展新特性 | MAVSDK维护者Jonas Vautherin | PX4线上开发者峰会2020·直播录像
在Linux上运行ArduPilot和AirSim1.3.0软件在环仿真(SITL)由ArduPilot核心开发者Andrew Tridgell演示
【PX4开源飞控】这是无人机?飞机?不,是Jetman!| Flybotix研发工程师Julien Lecoeur | PX4线上开发者峰会2020·直播录像
【PX4开源无人机】SmartWings: 飞行器的主动湍流抑制 | Andras Galffy | PX4线上开发者峰会2020
【思动学院】VMware虚拟机Ubuntu/Linux系统满帧率运行Gazebo仿真 | PX4入门之开发环境搭建视频教学
【无人机】现代无人机系统的高能效电力推进 | 由Zubax的Alexander Sysoev和Pavel Kirienko主讲 | PX4开发者峰会2019
【开源飞控】QGroundControl(QGC地面站)入门教学
【无人机】PX4开发者峰会开场 | 由Dronecode项目经理Roman Roche主持 | PX4开发者峰会@ETH苏黎世联邦理工大学
【研讨会】PX4开源无人机介绍与入门 | SITL仿真与MAVSDK演示 | Arm Innovation Coffee
【PX4开源无人机】在经过适航认证的飞行器上使用PX4需要注意什么? | Gokul Krishna Srinivasan | PX4线上开发者峰会2020
【德国大神OlliW42】OpenTx遥控与MAVLink回传脚本:硬件部分
PX4+ROS+SVO 2.0 仿真+实机 | 解决城镇物流最后一公里问题:自主无人机快递把快递送到你的阳台
【开源飞控】ArduPilot+T265室内无GPS测试
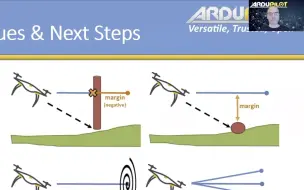
【ArduPilot开源飞控】物体躲避更新 | 核心开发者Randy Mackay讲解 | 2020年ArduPilot线上开发者大会
PX4软件在环(SITL)仿真现已支持FlightGear
[视频教学] 快速实现 PX4 Offboard 模式飞行以及 Gazebo 仿真 | 无人机自动驾驶GAAS 01