V
主页
京东 11.11 红包
六自由度机械臂+RRT路径轨迹规划算法仿真
发布人
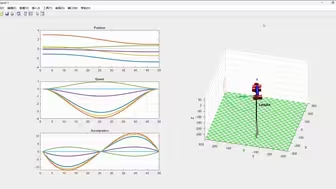
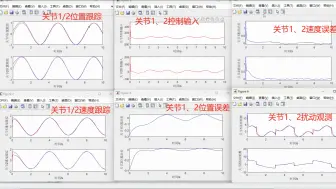
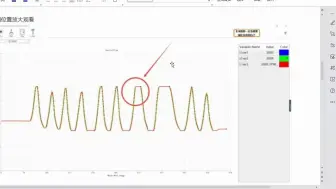
六自由度机械臂+RRT路径轨迹规划算法仿真 描述:将RRT路径轨迹规划算法与机械臂进行结合,且机械臂为六自由度机械臂 程序中障碍物,起始点坐标均可修改 包括:六关节曲线、关节速度曲线、加速度曲线 程序附带详细中文注释,快速学习RRT+机械臂,事半功倍
打开封面
下载高清视频
观看高清视频
视频下载器
[复现]基于MPC模型预测控制水下机器人AUV路径规划及轨迹跟踪仿真
机械臂关节空间轨迹规划【笛卡尔空间+混合多项式+五次多项式】
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
A星+DWA算法融合路径规划(动态+静态避障)
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
机械臂笛卡尔空间与关节空间圆弧+直线轨迹规划MATLAB程序
基于神经网络的船舶轨迹跟踪自适应滑模控制【附参考文献】
IEEE'24 | 最小成本!安全协作!异构无人机飞行的路径规划新策略!
改进蚁群算法的机器人,无人机,无人车,无人船的路径规划算法
基于人工势场法的机械臂避障路径规划方法Matlab仿真
机械臂笛卡尔空间位姿插补
基于MATLAB/simulink的B样条曲线路径规划自动平行泊车
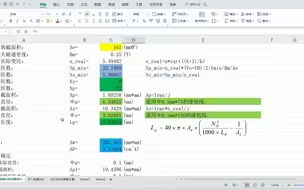
反激式开关电源参数详细设计全套资料,包含每一个元件参数计算详细
分享一位大佬的FOC电机控制学习笔记(很有用)
220V转24V_12V_5V开关电源设计资料
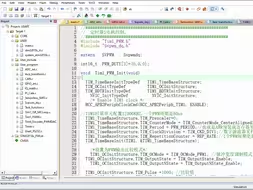
RS485 Modebus RTU通讯协议C语言实例
基于非线性干扰观测器的机械臂自适应反演滑模控制【参考文献】
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
基于STM32的ADC采集滤波算法_卡尔曼_中位值_同步对比输出源程序
把玩 HybridAstar -- 双向搜索初步
复现_基于一致性算法的改进自适应虚拟阻抗多机并联控制Simulink仿真
分享网上一位大佬的永磁同步电机控制解析+代码讲解(PDF资料)
(ACO_VRPTW)蚁群算法优化解决带时间窗约束的车辆路径规划问题(VRPTW问题)
PID_反步控制_滑膜控制三种四旋翼无人机轨迹跟踪控制算法仿真
【顶刊复现】基于MPC模型预测控制水下机器人AUV的路径跟踪
PFC-LLC谐振开关电源设计方案整套学习资料(程序+仿真+硬件软件说明报告+原理图+计算书等等)
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
基于STM32实现PID控制程序
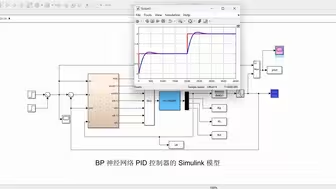
BP神经网络PID控制器的S函数实现仿真模型
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
论文复现:MPC-D-CBF (基于动态屏障函数的移动机器人balabala的模型预测控制)
四开关Buck-Boost双向DC-DC电源整套学习资料
【即插即用】Pybullet端强化学习算法训练机械臂
改进两级式光伏并网+低电压穿越+改进MPPT算法Matlab仿真模型
基于STM32F1和F4系列的无感FOC电机控制代码
如何在摄像头中精准定位物体的像素坐标
风光储并网发电系统仿真模型
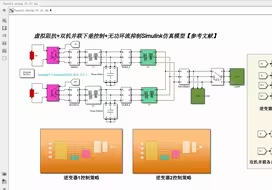
改进下垂+虚拟阻抗+双机并联+无功环流抑制Simulink仿真模型【参考文献】
LLC电感与变压器、PFC电感、L6599AD参数计算公式表格