V
主页
基于非线性干扰观测器的机械臂自适应反演滑模控制【参考文献】
发布人
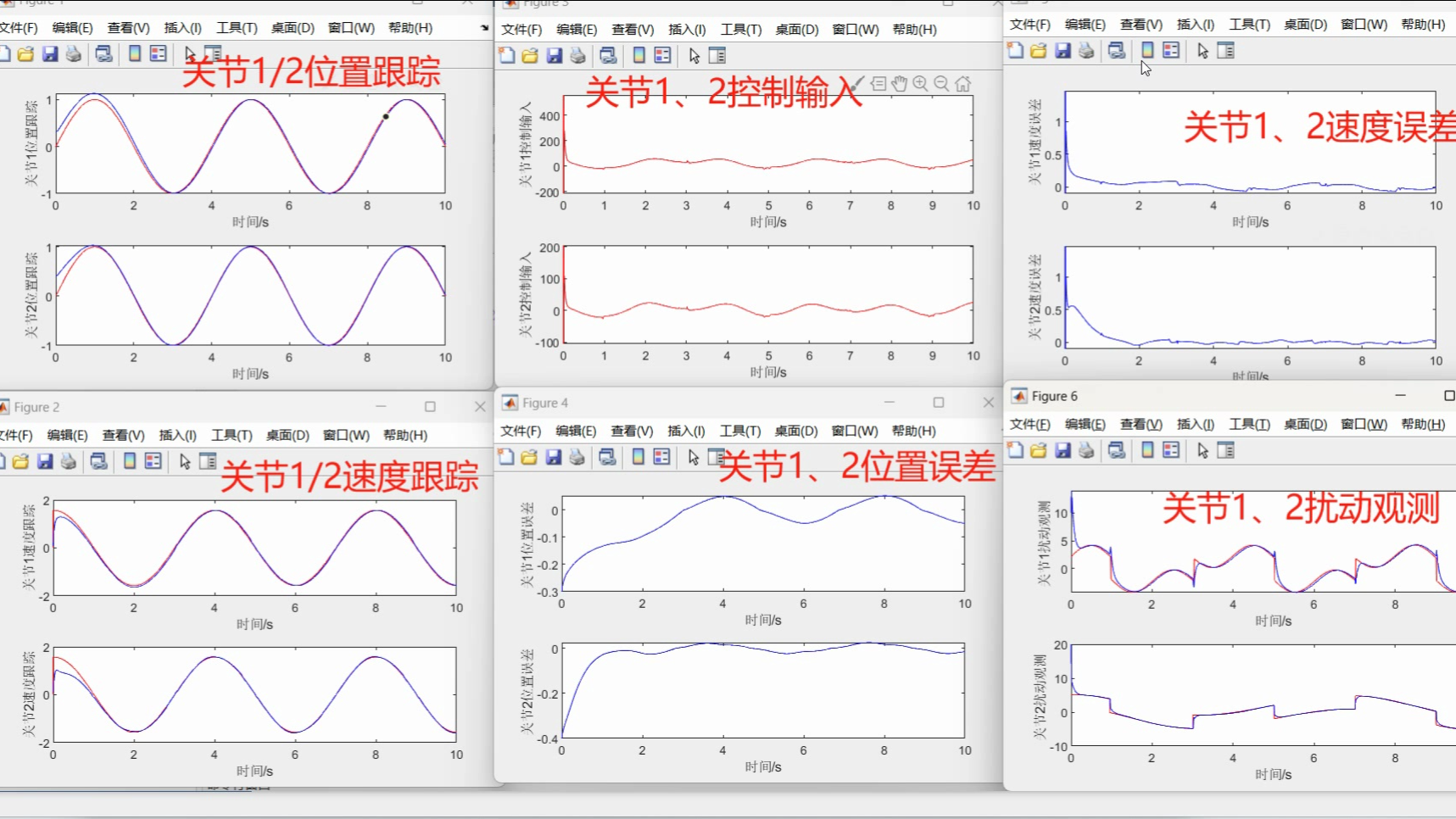
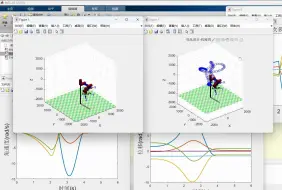
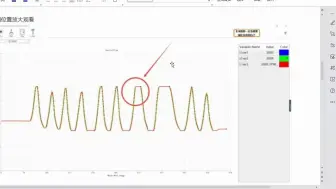
基于非线性干扰观测器的机械臂自适应反演滑模控制【参考文献】 控制思路:对于干扰信号中的可观测部分,采用非线性干扰观测器进行在线观测,通过选择设计参数使观测误差指数收敛.针对引入非线性干扰观测器后的系统采用自适应反演滑模法设计控制器,控制律的设计保证了闭环系统的稳定性,自适应律的设计对未观测出的干扰进行了补偿,提高了机械臂的位置跟踪性能 仿真效果:与传统反演滑模控制方法相比,该方法能 够比较理想地观测干扰,不仅提高了系统的跟踪性 能,而且较好抑制了系统的抖振,具有较强的鲁棒 性和抗干扰性 参考文献:《基于非线性干扰观测器的机械臂自适应反演滑模控制》
打开封面
下载高清视频
观看高清视频
视频下载器
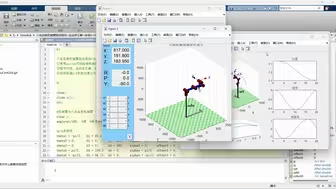
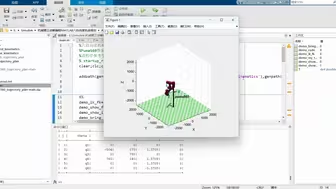
机械臂自适应反演滑模控制(非线性干扰观测器)Matlab仿真
基于神经网络的船舶轨迹跟踪自适应滑模控制【附参考文献】
自抗扰控制ADRC_跟踪微分器TD_状态误差NLSEF_状态观测器ESO
【一区顶刊复现】自适应强化学习机械臂固定时间轨迹跟踪控制(输入饱和不确定)
BP神经网络自适应PID控制 matlab仿真【附说明文档】
六自由度机械臂多项式关节空间轨迹规划算法【3次多项式、5次多项式插值法、353多项式】
基于RBF神经网络的PID自适应参数调节控制
基于非奇异终端滑模控制的二自由度机械臂系统
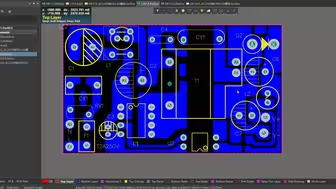
220V转24V_12V_5V开关电源设计资料
永磁同步发电机非线性扩张状态观测器NESO无位置传感器控制
PI双闭环控制的三相PWM整流器simulink仿真模型【参考文献】
STSMC超螺旋滑模与传统滑模SMC控制对比Simulink仿真
三相整流器不平衡电网MPC模型预测+ADRC自抗扰控制仿真【参考文献】
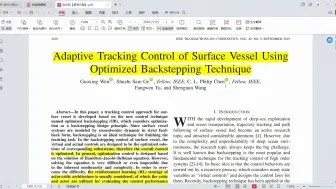
【SCI一区复现】基于优化反步控制的水面舰船自适应跟踪控制
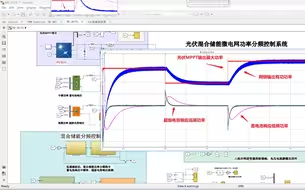
光伏混合储能微电网功率分频控制系统【参考文献】
复现_基于一致性算法的改进自适应虚拟阻抗多机并联控制Simulink仿真
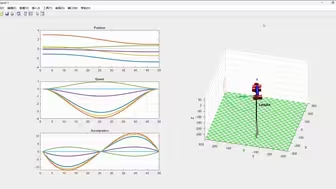
六自由度机械臂路径规划+运动学正解+标准D-H参数法
六自由度机械臂正逆解编程轨迹规划
【英文复现】永磁同步电机负载状态估计_转矩估计_龙伯格观测器_卡尔曼滤波器
力反馈手套在遥操作方案中的应用
基于自适应模糊PID控制实现双容水箱液位系统【附说明文档】
风光储构网型VSG惯量阻尼参数自适应调节控制仿真【复现】
【复现】连续线性系统自适应最优输出与动态规划控制调节Matlab程序
六自由度机械臂+RRT路径轨迹规划算法仿真
基于STM32的ADC采集滤波算法_卡尔曼_中位值_同步对比输出源程序
PFC-LLC谐振开关电源设计方案整套学习资料(程序+仿真+硬件软件说明报告+原理图+计算书等等)
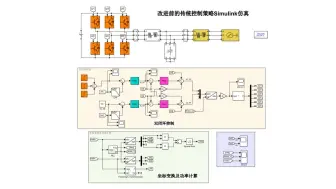
改进下垂+虚拟阻抗+双机并联+无功环流抑制Simulink仿真模型【参考文献】
改进二阶超螺旋滑模观测的永磁同步电机无位置传感器控制仿真
(复现)基于观测器的事件触发跟踪一致性控制(非理想一般线性多智能体系统)
永磁同步直线电机PMLSM滑模与PI控制simulink仿真模型(附参考文献)
风光储互补构网型VSG虚拟同步机并网发电系统仿真【附参考文献】
机械臂笛卡尔空间与关节空间圆弧+直线轨迹规划MATLAB程序
【复现】二自由度机械臂自适应分数阶滑模控制(FOSMC)+分数阶PID
改进双锁相环跟网型逆变器小干扰稳定性分析阻抗重塑仿真模型【复现】
今天把我做的这个机械臂开源
光伏储能三相PQ恒功率并网控制仿真(附参考文献及文档)
六自由度机械臂五次_七次多项式样条插值曲线_五次B样条曲线插值【三套代码】
永磁同步电机模型参考自适应MRAS控制Simulink仿真
多逆变器自适应虚拟阻抗下垂控制策略simulink仿真
分享网上一位大佬的永磁同步电机控制解析+代码讲解(PDF资料)