V
主页
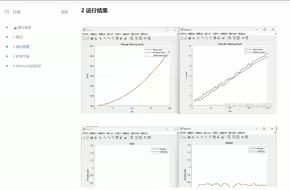
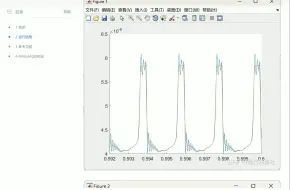
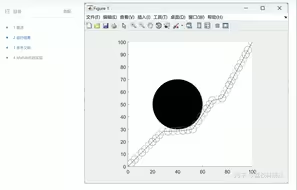
【IMU数据与GPS融合的预积分方法】基于流形的IMU预积分,用于高效的视觉惯性最大后验估计、SE3姿势区分为IMU(Matlab代码实现)
发布人
【IMU数据与GPS融合的预积分方法】基于流形的IMU预积分,用于高效的视觉惯性最大后验估计、SE3姿势区分为IMU(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
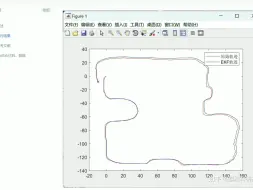
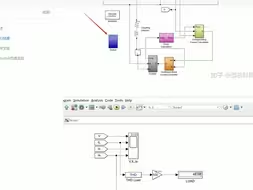
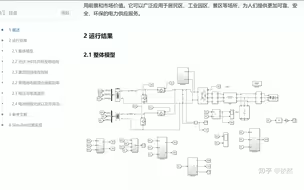
使用卡尔曼融合GPS数据和加速度数据,一方面提升定位输出速率,一方面可以再GPS信号不好时通过IMU惯导辅助纠正路线,加速度数据已经转为惯导坐标系下,并做了滤波
非线性模型预测控制MPC问题求解研究(Matlab代码实现)
【GPS与高速传感器、尔曼滤波器】使用IMU + GPS数据的姿态和位置参考系统(Matlab代码实现)
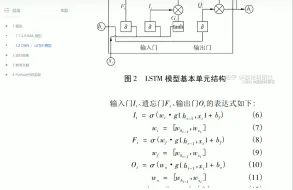
【LSTM-Attention】基于长短期记忆网络融合注意力机制的多变量时间序列预测研究(Matlab代码实现)
基于卡尔曼滤波KalmanFilter的估计估计研究(Matlab代码实现)
【故障诊断】齿轮系统的传递路径分析(TPA)(matlab实现)
【2024年数维杯A题】国际大学生数学建模挑战赛——多源机会信号建模与导航分析(思路、代码......)
【路径规划】动态路径规划(Matlab代码实现)
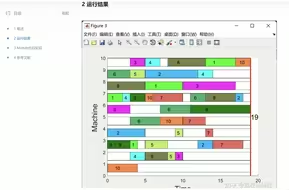
【车间调度】基于卷积神经网络的柔性作业车间调度问题的两阶段算法(Matlab代码实现)
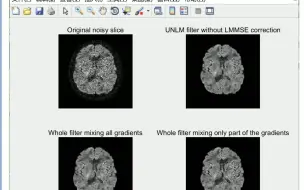
用于弥散加权MRI的关节各向异性维纳滤光片研究(Matlab代码实现)
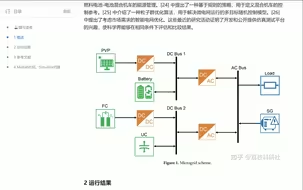
【AC/DC微电网的能源管理策略】微电网仿真模型包括光伏发电机、燃料电池系统、超级电容器和直流侧的电池,包括电压源变换器(VSC),用于将微电网的直流侧与交流侧
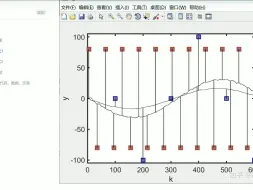
【状态估计】观测信号(包括异常值)的状态估计方法(Matlab代码实现)
基于三相pq理论的单相并联有源电力滤波器能够在单相系统中减轻谐波电流,并补偿无功功率(Simulink仿真实现)
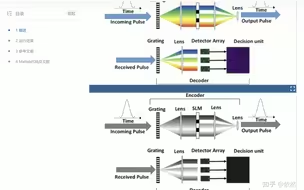
【脉冲通信】用于空间应用的飞秒脉冲通信的符号误码率模型研究(Matlab代码实现)
一种用于永磁同步电机PMSM的自适应状态反馈速度控制器(Simulink仿真实现)
【水下机器人建模】基于QLearning自适应强化学习PID控制器在AUV中的应用研究(Matlab代码实现)
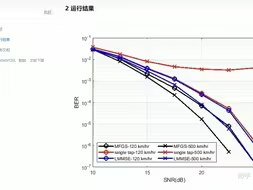
【单载波调制方案】正交时序多路复用调制:分析和低复杂度接收机设计(Matlab代码实现)
基于量子粒子群算法(QPSO)优化LSTM的风电、负荷等时间序列预测算法(Matlab代码实现)
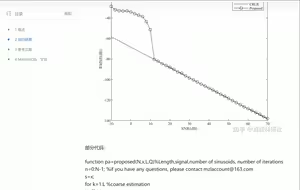
一种对真正正弦波频率进行准确估计的方法(Matlab代码实现)
【多重信号分类】超分辨率测向方法——依赖于将观测空间分解为噪声子空间和源、信号子空间的方法具有高分辨率(HR)并产生准确的估计(Matlab代码实现)
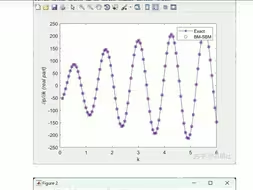
【一种新的Burton-Miller型奇异边界方法(BM-SBM)】用于声学设计灵敏度分析,2D和3D声学设计灵敏度分析的奇异边界方法研究(Matlab代码实现
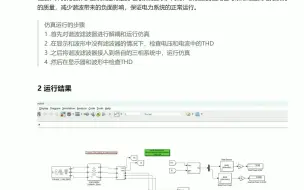
【无源谐波滤波器通常用于电力系统中的谐波抑制】用于抑制电力系统谐波的无源谐波滤波器(Simulink实现)
基于ARIMA-CNN-LSTM预测模型研究(Python代码实现)
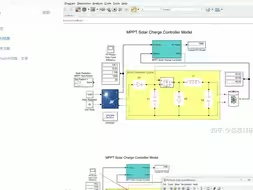
【光伏MPPT铅酸电池充电控制器的建模,用于独立系统应用】充电控制器可以执行太阳能光伏最大功率点跟踪,以充电铅酸电池(Simulink仿真实现)
一种高效的自主学习方式——基于簇头的方法 Vanet中的路由(Matlab代码实现)
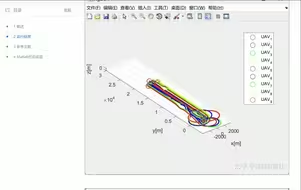
【无人机】无人机群在三维环境中的碰撞和静态避障仿真(Matlab实现)
【极简步骤】最新Matlab 2024a安装激活教程 附安装密钥 手把手 零基础轻松学会
光储并网直流微电网simulink仿真模型,光伏采用mppt实现最大功率输出研究
白噪声下真实正弦波的精确频率估计研究(Matlab代码实现)
【永磁同步电机】基于SVPWM的三电平逆变器PMSM速度控制(Simulink仿真实现)
【GPS+INS在MAV导航上的融合】基于间接卡尔曼滤波的IMU与GPS融合MATLAB仿真(IMU与GPS数据由仿真生成)(Matlab代码实现)
基于改进粒子群算法的含碳捕集微网多时间尺度低碳经济调度(Matlab代码实现)
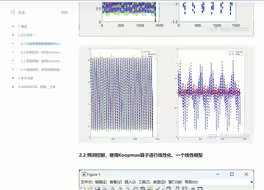
基于数据驱动的 Koopman 算子的递归神经网络模型线性化,用于纳米定位系统的预测控制研究(Matlab代码实现)
基于自抗扰控制ADRC的永磁同步电机仿真模型(Simulink仿真实现)
基于模型参考自适应的永磁同步电机仿真模型(Simulink仿真实现)
用于无人机到地面路径损耗计算研究(Matlab代码实现)
基于纳什谈判理论的风–光–氢多主体能源系统合作运行方法(Matlab代码实现)
基于物理表面张力-神经网络分类方法实现对教师学校心理社会风险水平的预测研究(Matlab代码实现)
一种用于高斯信号的贝叶斯步进最小均方LMS算法(Matlab代码实现)
【电缆】中压电缆局部放电的传输模型研究(Matlab代码实现)