V
主页
京东 11.11 红包
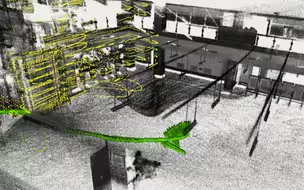
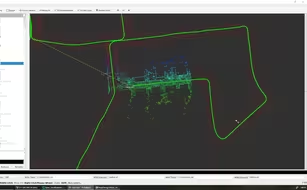
地下停车场场景激光雷达定位
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
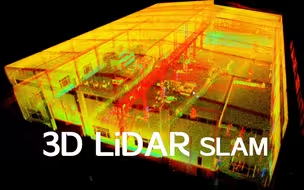
三维激光雷达室内场景定位
3D激光雷达工厂环境建图(Livox mid360)
激光语义建图(Semantic-LOAM)
除了激光SLAM和视觉SLAM还有哪些研究方向
RTABMAP算法激光视觉融合SLAM
2d slam-移动机器人自主全局重定位展示
基于先验地图的通用激光雷达定位框架
【工业仿真】FlexSim简单模拟真实工厂运行
【中英精校】走进领先的机器人仓库,Brightpick机器人是全球唯一可以在仓库过道内像人类用手推车一样自动拾取和整合订单的自主移动机器人
基于ROS2的树莓派自主定位与导航小车
RING#: 基于等变BEV特征的视觉激光通用全局定位
轮式里程计激光里程计视觉里程计区别是什么
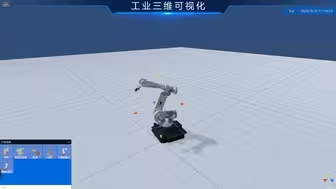
工业数字孪生编辑平台
激光雷达SLAM不同算法的对比
Talk | 香港科技大学黄华健:高写实三维数字化时代下的在线同时定位和建图
【华南农业大学】激光视觉惯性SLAM建图 - 农业工程楼
多传感器融合SLAM松耦合与紧耦合
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
FAST-LIVO2: 高效鲁棒的激光雷达-惯性-视觉融合算法,可用于实时高精度三维重建,无人机和机器人在退化场景的机载定位。
DOM-60 为机器人带来前所未有的感知能力
全地形移动机器人底盘 和传统AGV 的室内外运行对比
ChainSLAM实时建图演示
AGV小车,AGV搬运机器人,工业机器人,智能搬运小车,智能仓储设备。
【海克斯康RealSLAM10】即刻探索三维世界
激光雷达SLAM多传感器融合算法中工程化技巧总结
隧道里面抡摆锤,暴力SLAM测试!
听劝不要轻易入坑SLAM
机器人多传感器融合
Matlab玩家狂喜!!!纵享丝滑~
SLAM为什么需要IMU
【华南农业大学】激光视觉惯性SLAM建图 - 经济管理学院院楼
AGV车载顶升旋转机构
22.地图更新方法
铰接式车辆的运动规划
视觉惯导融合SLAM内外参标定是关键
刚性咬合链拆解视频
智能物流仓储数字孪生系统,实现无死角实时监控,提高管理效率,降低管理成本
【神话武器】AMR-亚特兰蒂斯
SLAM为什么需要闭环检测
SLAM-Viewer,SLAM便捷可视化小工具