V
主页
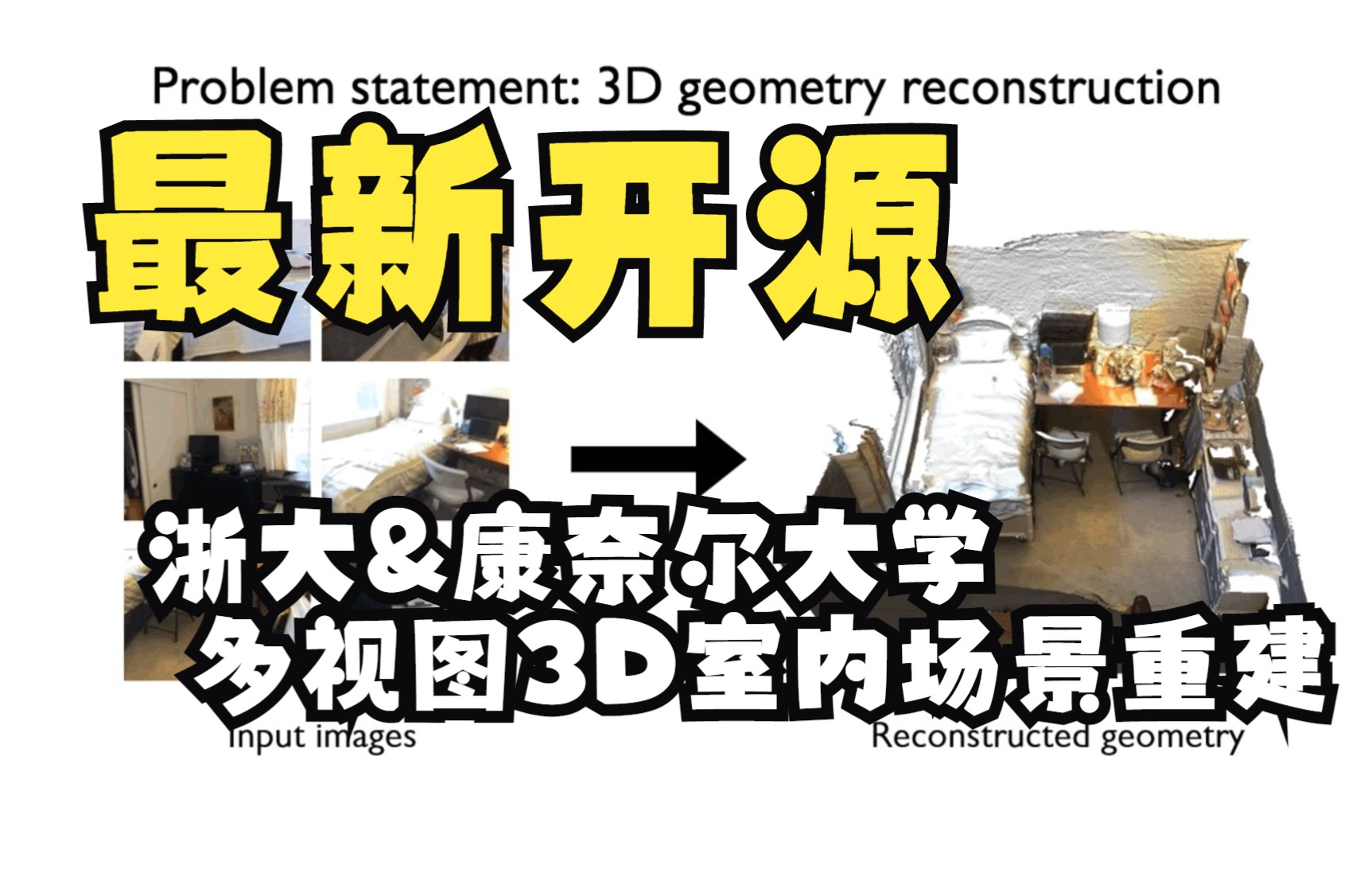
【最新开源】建模师要失业了?浙大&康奈尔大学多视图3D室内场景重建,细节拉满!CVPR2022
发布人
https://www.youtube.com/watch?v=oEE7mK0YQtc 本文讨论了从多视图图像重建三维室内场景的挑战。以前的许多工作已经在纹理对象上显示了令人印象深刻的重建结果,但它们仍然难以处理室内场景中常见的低纹理平面区域。我们使用MLP网络将有符号距离函数表示为场景几何体。基于Manhattan-world假设,采用平面约束对二维语义分割网络预测的地板和墙壁区域的几何结构进行正则化。为了解决分割不准确的问题,我们使用另一个MLP对3D点的语义进行编码,并设计了一种新的loss,该loss联合优化了3D空间中的场景几何和语义。在这项工作中,我们证明了平面约束可以方便地集成到最近基于隐式神经表示的重建方法中。在ScanNet和7-Scenes数据集上的实验表明,该方法在三维重建质量上大大优于以前的方法。 项目主页:https://zju3dv.github.io/manhattan_sdf/ 代码链接:https://github.com/zju3dv/manhattan_sdf 论文链接:https://arxiv.org/abs/2205.02836
打开封面
下载高清视频
观看高清视频
视频下载器
SLAM入门简介及ORB-SLAM2论文精讲
【B站强推!】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,看完小白也能信手拈来,建议收藏!计算机视觉|点云
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
【卷王必备】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,全程干货无尿点,草履虫听了都点头!—人工智能/神经网络/深度学习
上海交通大学博士分享基于神经隐式表征的语义SLAM(下)
计算机视觉-OpenCV入门讲解!从配置安装到项目实战,迪哥带你3小时快速上手!
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
研一、研二必学!猫狗识别代码详解一迪哥手把手带你基于TensorFlow+CNN实现猫狗二分类,学完就能跑通!
西北工大开源DenseFusion:多无人机协同实时稠密重建方法!
手持slam设备(灵感源自麦克风)
公开课 | 无人机实时及快速地图重建
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
【最新开源】TUM&谷歌等研究RGB-D表面重建,细节拉满!CVPR2022
2024最新录制!华理计算机博士精讲深度学习PyTorch框架,入门到精通,半天带你吃透深度学习!
01-NeRF与SLAM结合的早期探索
3DGS (3D Gaussian Splatting) 原理介绍
vs2022安装使用教程【2024最新】vs2022怎么创建c语言项目vs2022c语言教程vs2022系统找不到指定文件怎么解决
入门到精通!计算机视觉3D点云+三维重建手把手实战教学!整整85集,全程干货讲解,草履虫都能学!(人工智能丨深度学习丨论文写作丨研究生丨AI丨机器学习丨CV)
SIGGRAPH 2022|通过步态就能识别身体疾病,好神奇!
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
初学者必看!南京大学周志华教授的《机器学习西瓜书》从零解读!草履虫都能听懂!!!
【开源】CVPR2022|UBC&谷歌研究光场渲染的新视图合成,可准确再现场景!解决了反射、折射和半透明等问题!
【直播回放】视觉几何三维重建学习心得分享及作业讲解
无人机SLAM入门教程(一):课程概述1.2 预备知识概览
强推!我竟花2小时就学会了对抗生成网络GAN原理及实战,他是真的想教会我啊!
重磅开源!ETHZ&浙大&微软等提出NICE-SLAM:用于大型室内场景重建,细节控的福利!CVPR2022
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
【机器学习实战系列】:手把手教你使用python实现基于随机森林的气温预测项目实战,看完就能跑通!(附源码数据集)
2022年度盘点:十大最佳SLAM开源算法
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
小小的调试一下
卷积到底卷了啥?这绝对是全B站最通俗易懂的【卷积神经网络教程】!比啃书高效多了,草履虫听了都点头!(人工智能/机器学习/深度学习/神经网络)
【六哥答疑】多传感器融合SLAM如何开始研究呢?有哪些研究方向?
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
苏黎世皇家理工等发布!带闭环稠密神经SLAM
单目视频/图像重建高质量人头数字人
【直播回放】视觉惯性SLAM系统理论与实践(上)
华科、杭电与华为联合开源!实时动态场景渲染的4D高斯溅射
ICRA2022|单个360°相机的视觉里程计,无需校正即可获得全方位感知!港科大发布