V
主页
2022年度盘点:十大最佳SLAM开源算法
发布人
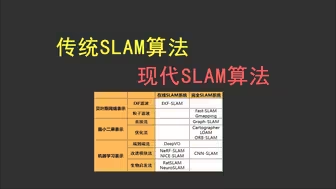
激光雷达里程计 视觉惯性里程计 视觉直接法 激光雷达里程计 激光雷达闭环检测 动态环境 NeRF & 稠密重建
打开封面
下载高清视频
观看高清视频
视频下载器
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
slam无人车重定位算法研发,目前估计国内我是第一个研发成功这种技术的。
SLAM高速路/隧道建图
搞SLAM算法还有前途吗
最伟大的深度学习算法
SLAM算法有哪些
高翔博士主讲:SLAM基础高效入门
激光SLAM和视觉SLAM哪个更有前途?
基于深度学习和双目SLAM的实时动态建图与定位
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
哈工大二校区SLAM建图
基于NeRF的SLAM方法小综述(截至2022),总结:已有雏形,既是短板,又是蓝海。
我做slam算法工程师已经一个月了|最大的感受就是轻松,简单,容易,好做,有手就行
爆火!这可能是全网最好的SLAM技术教程,不愧是华东高校的博士!3小时讲清楚无人驾驶和机器人slam,以及如何挖掘其论文创新点!
视觉SLAM如何入门?哪个是必学算法?
SLAM大都用C++编写,为什么不用Python呢
【论文讲解】Nice-SLAM:当NeRF遇到SLAM,会有多Nice?(CVPR 2022)
【一看就懂】SLAM算法原理通俗解读
2021年度盘点:十大最佳开源SLAM算法!
SLAM究竟如何下手?这是我见过最强的3D激光SLAM教程!中科院博士带你搞懂SLAM无人驾驶!原理、传感器、计算机视觉、无人机、VR
SLAM(orbslam2+yolov5+稠密建图)
ICRA 2022盘点:SLAM方向十大重点论文解读
智行者SLAM专家高翔博士:室内无人车和室外无人车有什么区别?
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
【高清】清华博士高翔:视觉SLAM基础知识从理论到实战
超火的视觉SLAM来了!清华大佬居然6个小时就将视觉SLAM原理讲解清楚了!真的很通俗易懂!建议收藏!——(slam算法、slam建图、slam入门、神经网络)
学习SLAM无从下手?学SLAM应该怎么安排?
研一最好的研究方向!自动驾驶SLAM算法实战解读,大佬带你快速提高代码能力及对自动驾驶的了解!自动驾驶/slam算法
【VSLAM】手写双目视觉SLAM系统-包括完整前后端和回环模块哈
【SLAM】ORB SLAM2 实验室点云建图
本科毕设-ORBSLAM3+YOLO
【SLAM核心算法】不愧是中科院博士教无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!
我大抵是难毕业了,效果巨烂。Yolov5+deepsort+1DCNN
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
《机器人SLAM导航核心技术与实战》书籍配套教学视频
高翔SLAM报告:开阔高动态区域的激光融合定位
SLAM学习路线分享
激光雷达视觉融合完成了,这次效果好了,重合了,嘎嘎香。
【最新开源】建模师要失业了?浙大&康奈尔大学多视图3D室内场景重建,细节拉满!CVPR2022
【开源】DSOL:一种快速直接稀疏里程计方案,处理速度提高5倍!宾夕法尼亚大学