V
主页
公开课 | 无人机实时及快速地图重建
发布人
赵勇,西北工业大学博士在读四年级,西安视野慧图智能科技有限公司CTO,IROS论文Map2DFusion及ICCV论文GSLAM一作,在IROS,ICCV,TGRS等会议期刊上发表多篇论文,同时编写了多种编程语言通用接口Svar并开源,在知乎”100 项开源视觉 SLAM 方案够你用了吗?“的统计中仅个人贡献了两个开源项目。 PPT:计算机视觉life公众号后台回复:西安视野
打开封面
下载高清视频
观看高清视频
视频下载器
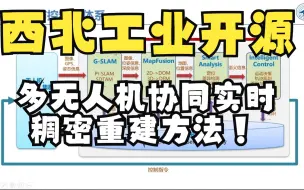
西北工大开源DenseFusion:多无人机协同实时稠密重建方法!
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(下)
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
1.2 如何快速学习开源代码?
有这三种征兆,是时候卖掉你的无人机了!
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
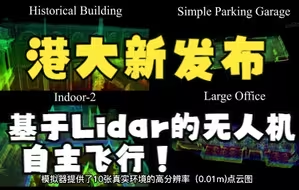
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
手把手带你入门SLAM
一键即可改变,3D人脸实时编辑!清华&腾讯最新开源!
可以在飞行中躲避快速移动物体的无人机
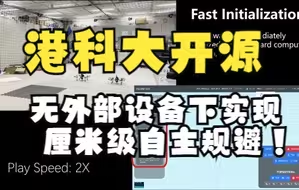
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
港大等提出细铁丝网SLAM和三维重建!专治疑难杂症😎
立体匹配算法原理与应用-奥比中光
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
动态SLAM论文综述讲解(含30+论文下载)!
1.4 ORB-SLAM2算法框架详解
MIT|仅用RGB相机作传感器,实时定位机器人!无需依赖初始姿势估计!
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
苏黎世皇家理工等发布!带闭环稠密神经SLAM
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
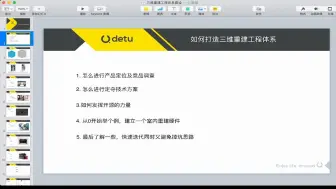
浙江得图CTO:如何打造三维重建工程体系?
2021年度盘点:十大最佳开源SLAM算法!
GNSS拒止下无人机视觉地理定位(a)
【硬核课程】ORB-SLAM2重点梳理1:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
深度学习三维重建学习计划
【直播回放】近期SLAM论文速览!干货满满!
【直播回放】同济大学DL-SLOT详解!动态激光SLAM和目标追踪
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
【SLAM前沿讲座】智利大学|用随机有限集统一SLAM的前后端
【直播回放】一位学姐的SLAM科研经历和秋招经验分享!
【六哥答疑】入门视觉SLAM,需要了解什么框架?
Arduino采集激光雷达数据可视化显示
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
【SLAM前沿讲座】TUM|深度网络直接法视觉SLAM
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
【线下讲座】占云龙:SLAM技术发展与存在的问题
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!