V
主页
【TRO 2024】灵巧双臂机器人操纵的目标条件双臂动作模仿学习
发布人
这篇论文的核心内容是关于一种目标条件化的双动作模仿学习(Goal-Conditioned Dual-Action Imitation Learning,简称 GC-DA)方法,用于灵活的双臂机器人操作。这种方法特别适用于处理变形物体的长期灵活机器人操作任务,例如剥香蕉皮。这项任务因为物体建模困难和缺乏稳定灵活操作技能的知识而成为一个问题。GC-DA方法利用人类示范数据学习灵活的操作技能。 主要贡献包括: 1. 提出了一种双动作架构,结合了反应性局部动作和基于轨迹的全局动作,以实现在保持操作策略稳定性的同时达到灵活性。 2. 利用双动作框架进行基于目标的策略推理。 3. 在真实的双臂机器人上使用香蕉剥皮任务评估了所提出的模仿学习框架。 研究中使用了深度学习在机器人和自动化领域的技术,包括灵活操作和双臂操作。研究团队通过实验验证了他们的方法,并成功地完成了香蕉剥皮任务。 论文还讨论了与机器人操作相关的工作,包括基于轨迹的方法、目标基础的策略学习、食品加工自动化等。此外,论文还介绍了使用注视(gaze)信息来提高机器人在视觉输入中对重要区域的关注,以及双动作方法来区分全局和局部动作。 研究结果表明,所提出的方法能够有效地处理机器人在执行长期任务时由于动作预测累积误差导致的稳定性问题,并且能够适应目标物体在执行过程中的意外变化。
打开封面
下载高清视频
观看高清视频
视频下载器
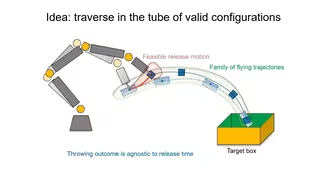
【TRO 2024】针对释放不确定性的稳健灵巧投掷
【TRO 2023】基于模仿和对比学习的稳定运动原语
我的2024机创仿生蝴蝶
小机器人拐走12台大机器人
太酷了!小孩哥骑着机器狗逛街 网友:不敢想他在幼儿园会有多拉风
【TRO 2023】扰动和未知动力学条件下稳健抓握和手部操作的自适应手指协调
家庭保姆机器人突然失控打烂显示器 跟主人Kai Cenat闹脾气
【CoRL 2023】Diff-LfD:基于接触感知模型的机器人操作视觉演示学习
【TRO 2023】力调制操作的实时可变形接触感知模型预测控制
ai永远无法替代ai
【TRO 2023】用于运动生成的动态优化结构
【ICRA 2023】机器人抓取的实例抓取合成
【CoRL 2022】从视频学习人手姿势先验的灵巧抓握
【TRO 2024】用于灵巧操作的任务驱动混合模型降阶
【TRO 2023】 机器人接触式杂耍
今天把我做的这个机械臂开源
【IJRR】贝叶斯机器人控制器融合:在深度强化学习中利用控制先验
【MIT MCube Lab】simPLE:一种在模拟中学习的视触融合操作方法
【ECCV 2022】 DexMV:从人类视频进行灵巧操作的模仿学习
尤瓦尔·赫拉利对谈张静初:AI正在制造慢不下来的人
Booster13 下沉
波士顿动力机器人可以完全自动工作了
【TRO 2023】-视触觉传感的模拟、学习和应用
【RAIL】HIL-SERL:通过人在环强化学习实现精确灵巧的机器人操作
【CoRL 2023 oral】MimicPlay:通过观察人类演示实现长序列模仿学习
【ICRA 2023】基于触觉运动基元的电缆布线和装配
【CoRL 2023 oral】Koopman算子理论在灵巧操作技能学习中的应用
【ICRA 2023】基于子步指导的图像自主真实世界RL的灵巧操作
二白深夜顺拐机器人
【2024年11月最新chatgpt】GPT4.0免费使用教程来了,无限次数使用,随便用!
机器人如何每日收割数百万英亩农田
【RSS 2023】行为检索:通过查询未标记的数据集进行少样本模仿学习
原来机器人中也有“人贩子”一个机器人拐跑一大批机器人 #智能机器人 #智能AI #离谱
【ICRA 2017】结合自监督和模仿的视觉绳索操作
2030年:当最强AI和最强机器人结合,会发生什么?
10分钟解释改变世界的新兴技术
谁特么关心你是不是用AI做的广告啊
在家作AI,昨天780,一台电脑,操作简单,分享我的接单平台,接单技巧和资源分享,目前经济自由!!
这年头机器人都这么可爱搞笑的嘛!
英国博主:中国将欧美科幻电影变成了现实