V
主页
京东 11.11 红包
【ICRA 2023】机器人抓取的实例抓取合成
发布人
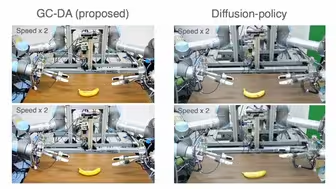
Instance-wise Grasp Synthesis for Robotic Grasping 字幕自制 生成高质量的实例式抓取配置提供了如何在多对象环境中抓取特定对象的关键信息,并且对于机器人操作任务非常重要。这项工作提出了一种新的单阶段抓取(SSG)合成网络,它在单阶段中执行高质量的实例抓取合成:同时为每个对象生成实例掩模和抓取配置。我们的方法优于最先进的机器人把握预测的基础上OCID-Grasp数据集,并执行竞争力的JACQUARD数据集。基准测试结果表明,显着的改进相比,基准的准确性生成的把握配置。所提出的方法的性能已通过广泛的模拟和真实的机器人实验三个任务,包括单对象的拾取和放置,掌握在杂乱的环境中的合成和表清洁任务进行了验证。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA 2023】基于触觉运动基元的电缆布线和装配
【TRO 2024】灵巧双臂机器人操纵的目标条件双臂动作模仿学习
【ICRA 2023】解耦技能学习与机器人控制实现可推广的对象操作
【RSS 2023】来自人类视频的结构化世界模型
【TRO 2023】 机器人接触式杂耍
【CoRL 2023】Diff-LfD:基于接触感知模型的机器人操作视觉演示学习
【CoRL 2022】从视频学习人手姿势先验的灵巧抓握
【MIT Sangbae Kim团队】利用高带宽传感和驱动实现具有反射的鲁棒自主抓取
【RSS 2023】一分钟演示实现机器人多用途模仿学习
LOTUS:通过无监督的技能发现实现机器人操作的持续模仿学习
【IJRR】贝叶斯机器人控制器融合:在深度强化学习中利用控制先验
【ICRA 2023】基于子步指导的图像自主真实世界RL的灵巧操作
【RSS 2023】机器人在职学习:部署期间的人机交互自主和学习
【CVPR 2023】可供性扩散:合成手-对象交互
【NeurIPS 2023 Workshop】通过价值函数预训练从互联网视频中获得机器人离线强化学习
【RSS 2023】行为检索:通过查询未标记的数据集进行少样本模仿学习
【TRO 2024】基于属性的数据高效自适应机器人抓取
【RAL 2023】HybGraps:用于高效机器人抓取的混合学习自适应夹爪结构
【TRO 2023】力调制操作的实时可变形接触感知模型预测控制
【TRO 2023】基于采样的移动机器人与铰接对象交互的鲁棒控制
2024吃透AI大模型(LLM+RAG系统+GPT-4o+OpenAI),3天学完,让你少走99%弯路!
【TRO 2023】-视触觉传感的模拟、学习和应用
【ICRA 2017】结合自监督和模仿的视觉绳索操作
【TRO 2023】扰动和未知动力学条件下稳健抓握和手部操作的自适应手指协调
【yolov8】一小时掌握!从0开始搭建部署YOLOv8,环境安装+推理+自定义数据集搭建与训练,入门到精通!
【ICRA 2023】SGTM 2.0:使用交互式感知自动解开长电缆
【ICRA 2023】在线增强习得的抓取序列策略提高手部工具操作的适应性和数据效率
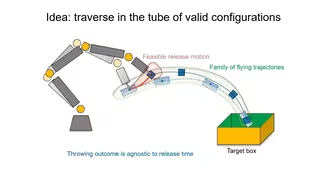
【TRO 2024】针对释放不确定性的稳健灵巧投掷
【CoRL 2023】CPM:基于分解部件的操作
【CoRL 2023 oral】MimicPlay:通过观察人类演示实现长序列模仿学习
【RSS 2022】DexTransfer: 使用少量的人类演示的真实世界的多指灵巧抓取
【Python抢火车票】假期出行抢不到车票? Python自动抢票脚本,12306中国铁路迅速出票!成功率高达100%!!
【Learning_and_adaptive_control】Lesson 4-Part 2 SEDS
【TRO 2023】使用路径集规划和跟踪的带约束的可变形对象操作
【TRO 2024】用于灵巧操作的任务驱动混合模型降阶
深度学习研一,三个月流水线一般发论文教程。
用Python做一个漂亮界面,竟然这么简单
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
【被导师放养】研究生SCI论文从写作到发表,SCI论文产出全过程精讲!手把手教你从写作到发表的全过程—论文写作_sci论文_sci论文写作
【24下软考】软考放水了!7天背完45+稳了!11.9软考无非就这些!