V
主页
【通用】人形机器人RL策略Gazebo二次仿真框架
发布人
开源地址: 所有机器人通用:https://github.com/fan-ziqi/rl_sar 仅人形机器人:https://github.com/FFTAI/Wiki-GRx-Gazebo
打开封面
下载高清视频
观看高清视频
视频下载器
【rl_sar】四足/人形机器人强化学习算法的仿真验证与实物部署框架
【开源】强化学习sim to sim
机器人强化学习再无环境问题-傻瓜式docker配置脚本
ESP32开发板-跟着稚晖君做的又一个项目
四足机器人多步态强化学习(仿真手柄控制)
【自制】ROS机器人四电机驱动控制板
小米铁蛋强化学习上楼梯,代码抄的
四足机器人强化学习sim to real(walk these ways)
写了一个人形机器人仿真,适用5或者6自由度的腿形
小米不开我来开!小米铁蛋URDF与仿真(基于宇树开源代码)
小米铁蛋后空翻仿真(基于宇树仿真框架与MIT代码)
四足机器人纯本体感知强化学习
【中文字幕】Reinforcement Learning - Steve Brunton
【白嫖】人形机器人大功率关节电机PCB工程
jaka机械臂+单目视觉 | 实现不同颜色物块的位置角度检测并分拣
自制双路SimpleFOC开发板,驱动两个无刷电机
人形机器人 手指机械结构
【中文机翻】非线性动力学与混沌 Nonlinear Dynamics and Chaos - Steven Strogatz
Oculus Quest2 V56更新手势追踪演示游戏 Move Fast
使用towr离线规划的rosbag在gazebo中进行物理仿真
小米机器狗强化学习上楼梯
欢迎加入Robot Developer Discord社群
基于分层优化的四足机器人全身运动控制搬运重物
平衡小车-静若处子动若脱兔
强推!上海交大、腾讯、中国科学院三方强强联合的【python+机器学习+深度学习】系列课程,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
有开源github代码! RA-L论文 人形机器人的多接触全身控制
尼龙3D打印摆线减速器【稚晖君方案】
双足机器人步态生成 MATLAB and Simulink
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
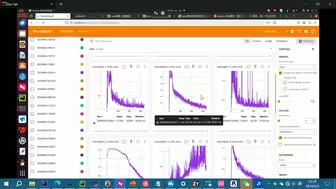
请问强化学习的损失是上升的怎么回事
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
08大模型全栈-强化学习01-RLHF前言传统强化学习
恐怖!活体人脸机器人,就这样诞生了
Go2使用教学01-开箱
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
双足机器人的深度强化学习- MATLAB and Simulink
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
基于QT的可视化路由训练平台+DQN强化学习(七剑学院QT项目,开发中)
秒杀波士顿动力Atlas机器人 清华叉院训练强化学习策略,小成本让H1人形机器人完成跑酷高难度动作
呐, 这就叫优雅~