V
主页
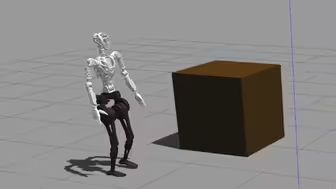
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
发布人
https://www.youtube.com/watch?v=gT1D4tOiKpo Proprioceptive External Torque Learning for Floating Base Robot and its Applications to Humanoid Locomotion 8 Sep 2023 · Daegyu Lim, Myeong-Ju Kim, Junhyeok Cha, Donghyeon Kim, Jaeheung Park · Edit social preview The estimation of external joint torque and contact wrench is essential for achieving stable locomotion of humanoids and safety-oriented robots. Although the contact wrench on the foot of humanoids can be measured using a force-torque sensor (FTS), FTS increases the cost, inertia, complexity, and failure possibility of the system. This paper introduces a method for learning external joint torque solely using proprioceptive sensors (encoders and IMUs) for a floating base robot. For learning, the GRU network is used and random walking data is collected. Real robot experiments demonstrate that the network can estimate the external torque and contact wrench with significantly smaller errors compared to the model-based method, momentum observer (MOB) with friction modeling. The study also validates that the estimated contact wrench can be utilized for zero moment point (ZMP) feedback control, enabling stable walking. Moreover, even when the robot's feet and the inertia of the upper body are changed, the trained network shows consistent performance with a model-based calibration. This result demonstrates the possibility of removing FTS on the robot, which reduces the disadvantages of hardware sensors. The summary video is available at https://youtu.be/gT1D4tOiKpo. https://daegyulim.github.io/assets/IROS2023.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
恐怖!活体人脸机器人,就这样诞生了
【通用】人形机器人RL策略Gazebo二次仿真框架
人形机器人足底机械结构设计
通过优化理论指导设计双足以达到控制和任务的最优
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
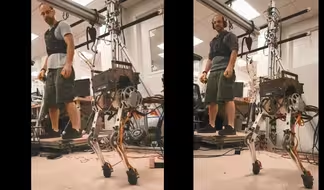
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
机器人打劫了 劫什么
双足机器人步态生成 MATLAB and Simulink
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
很少参加漫展,最后那个机器人是哪个动漫里的?哪个游戏里的?【圣微】
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Deep Compliant Control for Legged Robots
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
通过对抗运动先验学习四足机器人的双足行走
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
Safety-Critical Control of Autonomous Systems -Aaron Ames
Panoptic-SLAM:使用全景分割的动态环境中的视觉 SLAM 代码已开源
真牛!这个人形机器人吊打很多厂家的“产品”
【自制】我开发了一个通用机器人大脑!【硬核】
基于分层优化的四足机器人全身运动控制搬运重物
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
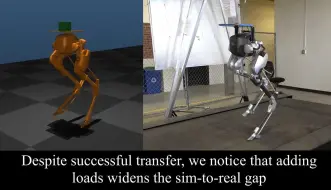
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
人形机器人灵巧手臂最新成果
全网近百万大学生研究生收藏!逐行解读深度学习代码的网站!
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
A Feasibility-Driven Approach to Control-Limited DDP
A Distributed Processing Approach for Smooth Task Transitioning in SHC
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots