V
主页
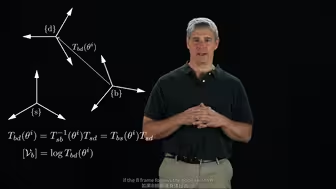
5.反向运动学
发布人
描述 Industrial Robotics是一门工业机器人课程,由Udemy Academy出版。 了解工业人形机器人的工作原理。我们将从逐步构建其运动学模型开始,然后规划几何路径并优化运动路径。我们将学习如何正确测量电动机并了解伺服驱动器的确切调谐方法。我们将介绍机械臂、仪器和单元的校准方法,最后为您的仿真生成逼真的数字孪生。 学习内容 学习掌握工业机器人的所有理论和实践细节:求解运动学模型、规划几何路径和动态路径、调整运动控制系统、校准工具和单元。 我们专注于标准的人形机器人,因为它是业内
打开封面
下载高清视频
观看高清视频
视频下载器
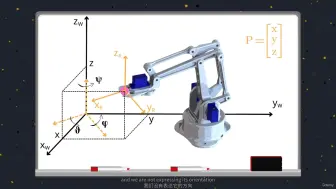
3、坐标系
章-6-反向运动学
12.校准
5. DASK
13.模拟
3. cuML
第3章-刚体运动-第2部分,共2部分
2.1.康耐视视觉传感器IS2000功能、规格
11.运动控制
第3章-刚体运动-第1部分,共2部分
6台机械臂的同步控制
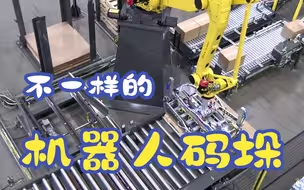
全球工业机器人经典案例13多功能码垛夹具
8.笛卡尔机器人数字孪生
6. 启用线轨机器人集成传感器和执行器与ROS2
04-7OF机器人臂
1.工业视觉系统基础
6.1 6.运动学ROS2
125期制造工艺惊人的生产线——全自动牙膏生产线
第8章——开链动力学——第1部分,共2部分
2.1本征半导体示例
1、课程介绍
第5章-速度-运动学和静力学
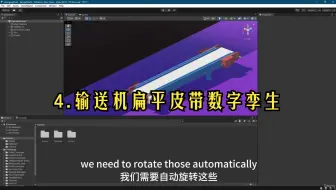
4.输送机扁平皮带数字孪生
第12章-抓取和操作-第2部分,共2部分
uinty逆运动学-机械臂动画1/2
第10章-运动计划-第2部分,共2部分
122期啤酒厂包装线体仿真
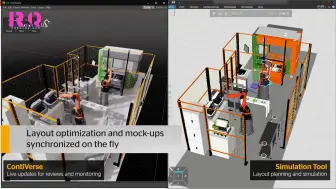
177 数字孪生的价值
Visual Components柔性电缆建模
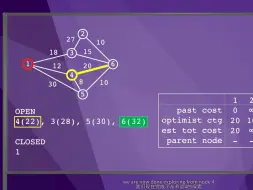
第10章-运动计划-第1部分,共2部分
13.API测试
3.机械臂编程
史上最强离线编程
2.2视觉介绍
9.笛卡尔机器人真空拾取放置端部效应器
章-7-闭链运动学
全球工业机器人经典案例之36汽车零件焊接
01-机械臂算法和ROS设置
117期机器人焊接单元的所有方案
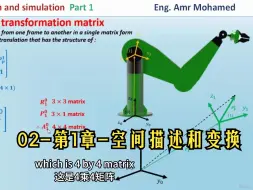
02-第1章-空间描述和变换