V
主页
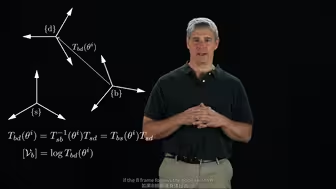
第12章-抓取和操作-第2部分,共2部分
发布人
描述 Modern Robotics: Mechanics, Planning, and Control Specialization 是 Coursera Specialized Academy 出版的一系列现代机器人教程。在本培训课程中,机器人力学、各种机器人机构的规划和设计、控制、运动学、机器人动力学、运动规划、机械臂的规划和控制等各种主题。将被讨论。这套教育是中级和半专业的,学生应该熟悉工程学的基本原理和基础。在课程中,您将学习一套用于分析、编程和控制机器人的工具,并以完全实用的方式应用
打开封面
下载高清视频
观看高清视频
视频下载器
第12章-抓取和操作-第1部分,共2部分
章-6-反向运动学
122期啤酒厂包装线体仿真
6.1 6.运动学ROS2
6.3 ROS 2模拟工具-点火凉亭
unity的c#编程方法
仿真项目案例集锦
14-youbot-运动学-模拟器-CSV-输出
6台机械臂的同步控制
工业机器人末端夹具系列
121期新能源电池涂胶装配
工业机器人末端快换的原理
ROS2从初级到高级(LEVEL2):使用 URDF 设计自定义机器人,在 Gazebo 中模拟机器人
143机器人线缆管的重要性
123期双传送带跟踪
117期机器人焊接单元的所有方案
《ROS 2机器人开发从入门到实践》1.3 运行你的第一个机器人
vc4.9新功能演示
《ROS 2机器人开发从入门到实践》2.5.3.2多线程与回调函数C++示例
136你绝对没见过的机械臂
《ROS 2机器人开发从入门到实践》1.2.4 在Ubuntu中安装ROS2
《ROS 2机器人开发从入门到实践》 1.4.1 Linux终端基础操作
《ROS 2机器人开发从入门到实践》2.5.2用得到的C++新特性
乐高版本6轴机械臂
186 多台协作机器人的组装
TM协作机器人教程2-编程的基本操作
11.运动控制
超详细!comsol教程四:结果后处理及可视化、数据集、绘图、结果导出、仿真报告
5.反向运动学
199 万向传送带的原理
4.2 ROS2的数字孪生
《ROS 2机器人开发从入门到实践》 2.1.2编写你的第一个节点( C++ 示例)
210 创意的包装机
2.1.康耐视视觉传感器IS2000功能、规格
增强现实 - Unity3D / Vuforia(对象控制)
04-7OF机器人臂
全球工业机器人经典案例13多功能码垛夹具
《ROS 2机器人开发从入门到实践》3.4.1完成工程架构设计
《ROS 2机器人开发从入门到实践》3.4.4在功能包中使用QT
蜘蛛手的逆运动学求解