V
主页
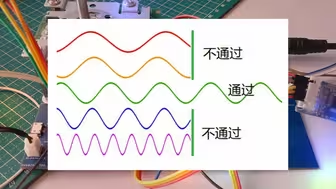
PID系统中滤波算法的使用
发布人
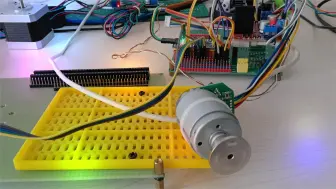
速度值在目标速度附近来回小幅度震荡,始终不稳定。这是因为编码器测速得到的速度值是离散的,如果电机的速度值刚好卡在两个离散值中间,我们测得的速度值就会在这两个离散值中间来回震荡。如果我们想要解决这个问题,最好先对测速的精度进行分析。
打开封面
下载高清视频
观看高清视频
视频下载器
PID 算法——让控制变得简单而高效
STM32单片机死机原因硬件、软件因素分析
STM32F103HAL库C语言编程驱动I2C总线读取AH10传感器数据串口输出
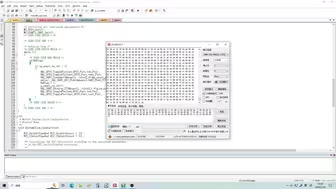
卡尔曼滤波在PID系统中的应用(源代码展示)
运动控制中滤波算法的作用及应用场景分享
PID控制中电机测速误差对比上位机演示(M法、T法、MT法)
无刷电机六步换向波形调试 (第十三期)
STM32编程控制无刷电机驱动玻璃门项目分享(第二期)
精准控制之道:串行三闭环系统模块关系解析
步进电机驱动器细分、斩波的原理和输出控制
【第六集】使用ESP8266编程利用WiFi链接网络订阅接收MQTT服务器的信息
STM32电机控制例程分享 第四期(定时器编程实现步进电机S型加减速)
STM32电机控制例程分享 第一期(步进电机控制方向匀速旋转)
终于成功啦~
PID串行三闭环STM32代码详解(六)电流采集模块
有多少同学都是从点亮一个LED灯开始的,又有多少同学是在点亮流水灯后结束的呢
STM32F103C8T6 定时器编程驱动步进电机转动
直流电机PID闭环控制使用定时器触发和使用主循环触发的相同点和不同点
步进电机驱动模块A4988的干扰异动
STM32单片机以太网通讯编程分享(一)TCP多机通讯
斩波与细分算法及编程代码实现
STM32单片机不同型号之间的HAL库代码移植浅谈(代码解析)
国产MCU芯片控制步进电机梯形加减速运转(电机例程分享 第十九期)
【第四集】使用单片机环境编程接收MQTT服务器上特定主题的信息
用友NC65服务器测试系统安装
STM32F4电机驱动例程讲解
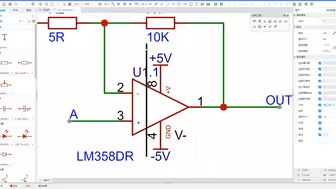
抛弃公式理解运算放大器
自动布线 规则很重要
1、使用LORA组网利用MQTT协议上报温湿度,到MQTT服务器的项目组成和编程建议
C#上位机编程与STM32单片机通讯实现2项4线步进电机实现远程控制
步进电机双闭环控制(第十六期)
stm32串口收发不定长数据,不判断帧头帧尾,不丢数,无DMA
上下位机:嵌入式工程中的默契(代码解析)
STM32控制直流有刷电机实现速度、位置、电流PID三闭环控制代码解析(三)PWM驱动模块
STM32步进电机编码器运动状态同步跟随 (第九期)
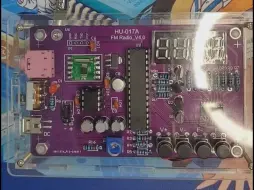
小时候玩的收音机,现在都买不到了。不过可以自己在家做一个。
【老-_-白】最新视频已上线,快来围观!
STM32简单粗暴驱动步进电机加减速
自动布线有“坑”还是老老实实手工做吧
STM32直流无刷电机的PID速度闭环控制源代码解析