V
主页
京东 11.11 红包
08_2KUKA机器人外部固定工具测量
发布人
KUKA机器人实用教程
打开封面
下载高清视频
观看高清视频
视频下载器
第28讲 KUKA机器人配置外部自动模式
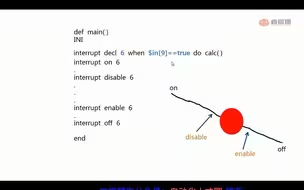
第26讲 KUKA机器人中断编程
第20讲 KUKA机器人调用当前位置变量
KUKA机器人高级编程(下)2-2 用KRL编写运动指令C
第27讲 KUKA机器人配置自动模式
08_3KUKA机器人测量由机器人引导的工件
10_7KUKA机器人简单数据和数组的使用1
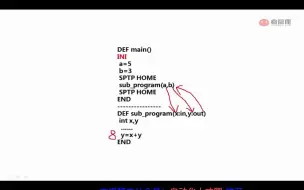
11_1KUKA机器人局部子程序和全局子程序的使用
14_1KUKA机器人具有外部TCP的运动编程
09_1KUKA机器人基坐标系测量1
04-2KUKA机器人示教器操作界面的功能与使用-1
12_3KUKA机器人沿轨迹运动的姿态导引
01-2KUKA机器人的分类及功能-2
04-4KUKA机器人示教器的基本操作-1
17_1KUKA机器人使用workvisual
KUKA机器人高级编程(上)4-2 函数编程C
10_6KUKA机器人简单数据和数组的使用1
KUKA机器人高级编程(下)2-3 相对运动C
15_4KUKA机器人程序的流程控制编程
03-3KUKA机器人的使用安全
15_2KUKA机器人以尖点工具为对象对抓爪进行编程
13_3KUKA机器人样条曲线运动编程
13_1KUKA机器人样条曲线运动编程
第03讲 KUKA机器人逻辑编程入门
KUKA机器人高级编程(下)5-10 中断子程序中的限制C
15_6KUKA机器人程序的流程控制编程
第11讲 KUKA机器人fold用法
KUKA机器人高级编程(上)3-4 参数传递的注意事项C
KUKA机器人高级编程(下)4-2 编辑SPS程序C
KUKA机器人高级编程(下)2-4 S和T参数说明C
04-3KUKA机器人示教器操作界面的功能与使用-2
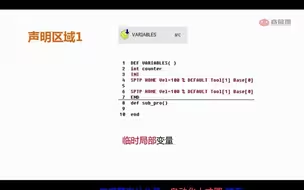
KUKA机器人高级编程(上)2-1 变量复习C
KUKA机器人高级编程(下)5-7 屏蔽中断C
KUKA机器人高级编程(上)3-3 如何使用参数传递C
01-3KUKA机器人的分类及功能-3
15_5KUKA机器人程序的流程控制编程
10_2KUKA机器人的结构化编程概述
13_9KUKA机器人绝对运动和相对运动编程
KUKA机器人高级编程(下)5-5 中断子程序C
14_3KUKA机器人以外部TCP的涂胶运动编程