V
主页
清华大学!大模型时代下的端到端自动驾驶
发布人
本次分享我们邀请到了加州大学伯克利分校博士后郑文钊,为大家详细介绍他的工作.如果您有相关工作需要分享,欢迎文末联系我们 直播大纲 1、如何实现自动驾驶大模型 2、纯视觉自动驾驶的发展脉络 3、以物体为中心的三维场景表示(GaussianFormer、SpatialFormer, ECCV 2024) 4、基于世界模型的端到端自动驾驶(GenAD、OccWorld, ECCV 2024)
打开封面
下载高清视频
观看高清视频
视频下载器
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
超预期!比亚迪智驾追赶这么快!腾势N7无图智驾抢先实测!
强推!这可能是B站最全的(Python+Transformer+大模型)系列课程了,堪称AI大模型系列课程的巅峰之作!-人工智能/提示词工程/RAG/大模型微调
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
四元数基础
【LLM前沿】6小时精讲四大多模态大模型CLIP BLIP VIT MLLM及对话机器人办公助手!绝对的通俗易懂的大模型应用教程!
大模型生成凡人修仙模拟世界
大作业|激光-视觉-IMU-GPS融合SLAM算法
3DGS进化,高效高质量的GaussianPro来袭!
ECCV 2024 oral | 首次基于深度聚类的多模态融合里程计网络
现在GPT5可能真出不来了,拿资源堆算力这条路可能真走不通
砍掉激光雷达行不行?端到端全面上车!小鹏P7+AI鹰眼智驾抢先测试!
亲测50帧!无需内参!超越Dust3r!Spann3r:无需优化对齐快速进行3D重建!
英伟达-OmniDrive:基于稀疏查询的三维自驾VLM框架
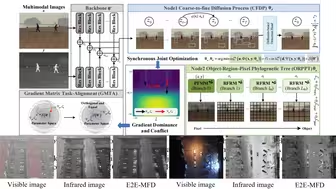
NeurlPS 2024 Oral | E2E-MFD 迈向端到端同步多模态融合检测 为智驾实现同步优化与性能提升
四旋翼无人机-PX4控制算法代码
BEV与Occupancy网络的全景解析与实战
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
一万块钱,显卡44G显存的深度学习主机,跑大模型的兄弟有福了
论文研读之“奶奶漏洞”为什么有效?:AI模型中的情绪刺激
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
研究生基本代码复现基本功!3分钟教会你如何跑通官方模型代码,再替换为自己的数据集跑通!人工智能|计算机技术|github
涩涩模型下载网站!!!全攻略!!!你想要的全都有
[ComfyUI]模型分类以及架构细分讲解,模型太多记不住?因为你没掌握方法
ECCV'24 | 23FPS!超越所有3D检测!港理工ScatterFormer:高效的体素序列处理Transformer
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
先进编译实验室新书上线!希望大家多多支持!!!
女大学生,高考703
年薪40W的提示词工程师需要掌握什么?吴恩达大佬1小时精讲Prompt:OpenAI调用,上下文构建,任务导向,关键词...看完就能写进简历!-大模型/人工智能
【大模型面试】Flash Attention面试连环炮,淘汰80%面试竞争者
极快跟踪一切!DOT:无惧遮挡!
自动驾驶中常用传感器硬件介绍
马斯克的AI大模型五分钟上手!每月25美元免费额度!
四旋翼模型简介-御风250模型
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
NeurIPS'24三维网格生成新模式!自回归大语言模型也能生成三维网格(上篇)
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
自动驾驶中的视觉感知技术
大模型Agent+RAG企业级项目实战:带你手把手打造个性化定制数字人,原理讲解+代码解析,草履虫都能学明白!(智能体|知识库|LLM|提示词)