V
主页
四旋翼模型简介-御风250模型
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
四旋翼模型与控制基础
四元数基础
四旋翼无人机-TD跟踪微分器原理与仿真
四旋翼无人机-实际飞行测试
大疆NEO,千万别急买!看似便宜,其实很贵!穿越机老登,值得入手?穿越小圈机还有活路吗?
大疆 NEO 无人机深度测评:小巧全能无人机?精彩与妥协并存
大疆G2眼镜电压可以到多低不会关机
零基础入门四旋翼建模与控制无人机 | 基础知识
测试大疆NEO首飞,视频看完一定了解这款飞机功能是否适合自己
高速结构光三维面形测量方法
点云3D深度学习模型与实践
【开源无人机】从零调试一架开源无人机
无人机|PID算法详解与实战(上)
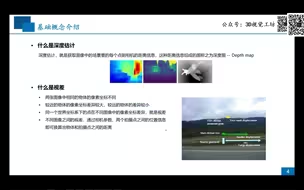
单目深度估计绪论
大疆neo禁飞区能飞吗?能。
无人机-PID算法详解与实战
Open3D-三维数据结构
零基础入门四旋翼建模与控制无人机 | 四旋翼PID控制
深度相机概述
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
无人机肆虐!50人迎战俄军5个营的炼油厂攻防战(三)
俄媒称“乌方购买中国无人机” 外交部回应
无人机|几何约束下多旋翼无人机的全状态在线轨迹规划
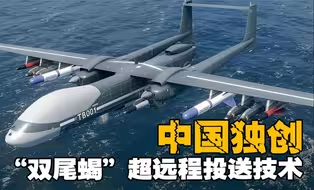
中国独创“双尾蝎无人机”,6000公里超远程投送,震慑美军航母!
御三在演示模式下是真的帅(附方法)
如何高效学习单目深度估计?
平替avata,模块化bee25穿越机,几百块超耐摔!
无人机—互补滤波姿态估计、卡尔曼滤波姿态、高度估计
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
光学3D测量技术原理及应用
Transformer模型结构
基于单张图片的3D人脸重建概述
三维点云系列视频——第一章绪论
【赛博日报】优雅的四旋翼飞机
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
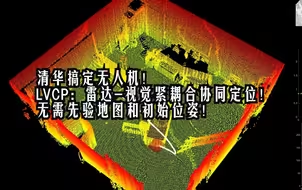
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
最新ICRA2021论文,EGO-Swarm:在杂乱环境中的全自动分散式四旋翼群系统
双目相机标定基础及标定实战
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
传统深度估计方法实战