V
主页
视觉SLAM定位算法
发布人
视觉slam算法 https://scm_mos.gitlab.io/slam/VINS-FUSION/
打开封面
下载高清视频
观看高清视频
视频下载器
高精度地图融合定位
异地打卡,虚拟打卡,定位
终于改装完成,户外机器人底盘,ROS,四轮驱动+阿克曼,支持二开
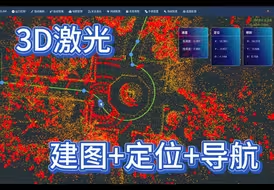
自制机器人在园区测试3D激光建图+定位+导航
ROS 智能小车 未知地图自主导航建图 机器人导论大作业留档
与SLAM实验车合影,留念一下并肩战斗的伙伴
【激光SLAM专题】LOAM如何运行
定位
什么是SLAM?一个小时即可带你入门,从理论到实战,不到五个小时就能搞定,跟着大佬一起嗑代码,太上头了!—视觉slam、计算机视觉、视觉slam实战、自动驾驶
导航遇到故障不用怕,原路倒回去就好了!
小白机器人相机+雷达做目标检测和跟踪测试
修改定位,虚拟打卡
程序员进大厂必看的十大排序算法,你学会了多少?
覆盖规划
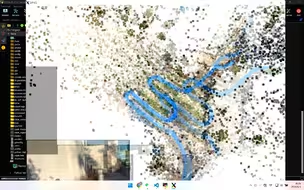
vins不知道怎么调了,飘的一批
终于画出来咯
correlative scan match 激光SLAM建图与定位
tagslam
基于ROS2的SLAM自主导航功能的实现
加速道路资产盘点,灵光Lixel助力交通管理智能化| 手持激光雷达
DPVO testing 0482
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
【RM24】视觉算法效果演示,这能算rv2?
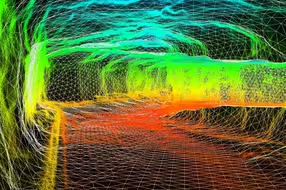
地库3D车道线重建 (3D Lane Line Reconstruction in Parking Scenario)
灵光Lixel L2,助力全球最长在建海底公路隧道项目
多边形机器人全局规划器
SLAM系列之Fast Livo复现(四)
多边形机器人局部规划器
第二天就要比赛了但是自瞄效果如下
Touchdesigner|植感奇境互动装置设计
SLAM系列之Fast Livo复现(五)
轻量级道路特征地图(开源了)
机器人视觉超宽视场针孔复眼|2024|Science Robotics【香港科技大学】
无需Ntrip服务器,仅需两块模组即可实现厘米级定位,WTRTK-982快速上手教学。
ROS中的目标检测与ORBSLAM结合
【自制】我开发了一个通用机器人大脑!【硬核】
满分旗舰!复合型导航机器人强势登场,室内外建图与导航定位专家!
多人协同和第三视角的定位方法-以及找我们开发同步需要做什么准备
更新前一天的准度
hfnet 视觉特征