V
主页
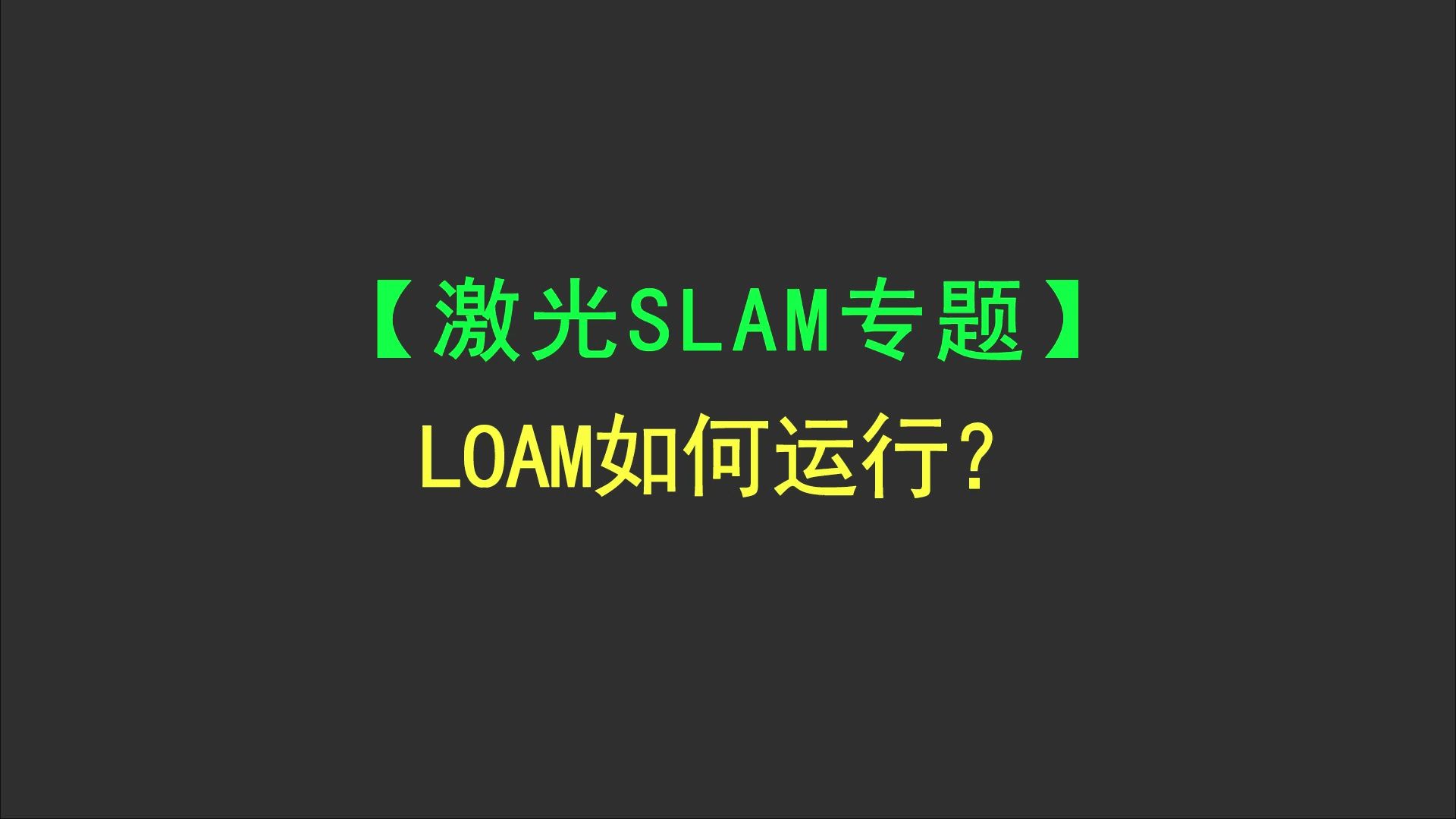
【激光SLAM专题】LOAM如何运行
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
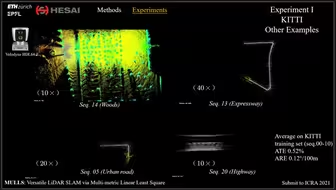
基于LOAM框架的3D激光SLAM
【新手必备】SLAM学习路线图
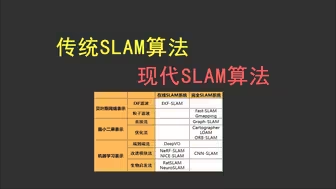
激光SLAM算法有哪些
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
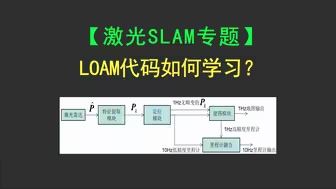
【激光SLAM专题】LOAM代码如何学习
【激光SLAM专题】Cartographer如何运行
先学激光SLAM还是先学视觉SLAM
多传感器融合的本质
【激光SLAM专题】Cartographer原理通俗易懂
IMU参数标定终于有人讲清楚了
【机器人关键技术】利用摄像头定位、建图、避障的原理解读
SLAM算法的本质数据关联
【激光SLAM专题】GMapping如何运行
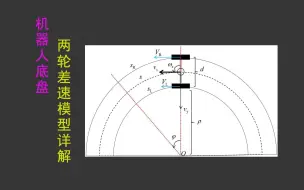
机器人底盘两轮差速模型详解
搞SLAM开发不比在非洲拉香蕉简单
最大似然、最小二乘和贝叶斯估计的区别
SLAM算法有哪些
【全网最详细】RGB-D相机原理分析
SLAM算法基本理论梳理
【一看就懂】SLAM算法原理通俗解读
机器人轮式里程计究竟是什么
除了激光SLAM和视觉SLAM还有哪些研究方向
【新手视频教程】+SLAM建图+自主导航+语音交互+(miiboo机器人出品)
【机器人操作系统】ROS本质上就是一个分布式通信框架
卡尔曼滤波的本质
22年十佳开源SLAM算法
机器人底盘两轮差速模型演变过程
SLAM大都用C++编写,为什么不用Python呢
SLAM算法源码正确阅读方式
视觉SLAM进阶-从零开始手写VIO
【全网最详细】摄像头原理分析
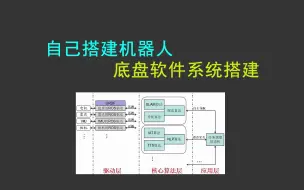
【自己搭建机器人】底盘软件系统搭建
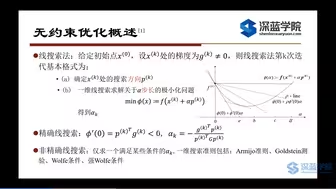
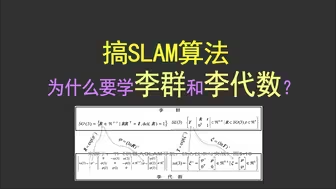
搞SLAM算法为什么要学李群和李代数
【自己搭建机器人】主机选择
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
视觉SLAM的本质多视图几何
机器人中的摄像头传感器
SLAM算法你真的了解吗
机器人底盘为什么是核心技术
GPS+IMU+3D激光建图