V
主页
复现Aloha算法
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
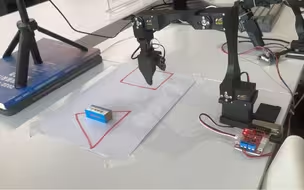
低成本机器人,全部使用国产舵机,复现aloha算法。
Aloha遥操作&示教500HZ复现
【自制】做了一台ROS视觉辅助机械臂
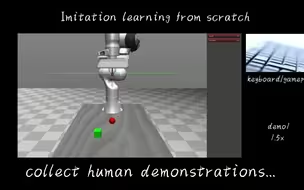
使用自定义环境收集数据集并基于diffusion policy训练一个简单的抓取任务
机械臂 开摆!
【毕设】基于手势识别的机械臂控制系统
【yfhome】低成本移动机械臂
Picker机械臂首秀
【论文复现】移动机械臂协同控制(八)——在Gazebo上实现UR5e_Tracer_Robot控制
3D打印机械臂
【论文复现】移动机械臂协同控制(十) Gazebo无重力补偿
遥操作主从控制系统
活动筋骨虽然抖,应该还能优化下…
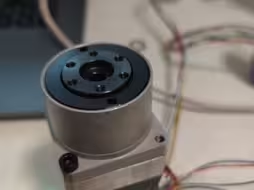
谐波减速机,可以动了,稚晖君机械臂复刻第一步
【手搓高科技】数学 + 机械臂能碰出什么火花
【论文复现】移动机械臂协同控制(二)——机械臂动态避障
【论文复现】移动机械臂协同控制(六)——UR5e_Tracer轨迹跟踪
【论文复现】移动机械臂协同控制(五)——UR5e_Tracer_Robot病态到达姿势
步进电机也能播放音乐,听听效果如何
《6分半的机械臂新手村学习总结》
机械臂仿真环境自动识别抓取
【论文复现】移动机械臂协同控制(七)——UR5e_Tracer_robot实物控制
毕业设计:机械臂数字孪生
控制精具身智能机械臂负载:1.5kg,极限负载<3.5kg (完成抖动不明显的全范围移动,坚持30s),静态夹持负载极限4.0kg。
【IROS2024】机器人移动操作
新型大中空零背隙关节减速器-七轴机械臂、六轴机械臂活动范围测试
【论文复现】移动机械臂协同控制(四)——UR5e_Tracer_Robot协同控制
【论文复现】移动机械臂协同控制(九) ——Gazebo上实现UR5e反应式控制
【论文复现】移动机械臂协同控制( 一 )——UR5e反应式控制
DIY机械臂,使用123D建模,拓竹A1打印
只要九百块,你就可以搞一台末端负载3公斤重复定位精度±0.03mm的四轴全伺服机械手机器人整机回去玩一个月,不能用你就亏900验证了您的想法,能用你就赚大发了
3d打印机械臂
Sepanta_AUT麦克纳姆轮机械臂小车3D图纸
树莓派实现的语音操作机械臂
木工魔块为发明创造而生,玩机械臂玩的走火入魔了、
先逐步把关节电机搞定,机器人组装第一步,稚晖君机械臂复刻还有漫长的路要走
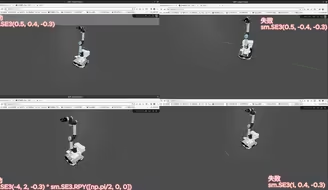
【isaac sim-15】具身仿真-你的第一个机械臂程序
迷你型机械臂,使用zigbee无线控制,加入了卡尔曼滤波。
机器人DH参数建模助手-实时显示模型变化-matlab+RTB
你的专属咖啡师