V
主页
使用自定义环境收集数据集并基于diffusion policy训练一个简单的抓取任务
发布人
初次尝试 diffusion policy,使用自己搭建的环境,并编写相应的遥操作和数据收集/回放脚本,这些脚本全部在 github 开源,搜索 robopal 即可。可以方便根据 robopal 搭建自己的环境并进行模仿学习,强化学习或多智能体强化学习的训练。
打开封面
下载高清视频
观看高清视频
视频下载器
基于chatgpt实现简单的机器人抓取仿真
【开源】TQC-HER 使用目标导向强化学习训练机械臂操作任务
【isaac sim-15】具身仿真-你的第一个机械臂程序
Mujoco机械臂导纳控制仿真
复现Aloha算法
Mujoco机械臂视觉伺服仿真
在仿真中使用大语言模型为机械臂作决策和规划的示例
使用mujoco的碰撞检测接口进行路径规划
Ros1通过moveit、话题通讯和tf变换等操作实现安装d435i相机和夹爪的ur机械臂对空间中球体的定位与抓取
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
基于六自由度机械臂避障的RRT轨迹+梯形速度规划算法
毕业季的复现记录--Cassie机器人
仿真实用工具之urdf,mujoco mjcf查看
【机器人】机械臂建模开发: 如何让机器人将物体抓取到指定位置?-MATLAB&Simulink
相信吗?新手也能5分钟写出PID和卡尔曼滤波代码
《6分半的机械臂新手村学习总结》
Isaac Lab中文版文档正式上线!
Arduino控制的机械臂 - 保存/回放/导出/导入动作
Solving Complex Long-Horizon Manipulation with Individual Skills
Unity matlab 通信 机械臂控制
RRT*-RDCBF
六轴机械臂控制器---示教编程和力控功能Python函数库
【机器人】机械臂建模开发: 基于模型的设计方法总结 - MATLAB&Simulink
【CVPR 2024】即插即用!一种把任意3D场景感知模型转换成在线检测模型的适配器
【yfhome】低成本移动机械臂
AI教母李飞飞创业3个月,公司估值超10亿美金
【IROS2024】机器人移动操作
当大模型遇上了机械臂
具身智能机器人通过虚拟现实和灵巧机械手进行复杂的操作
【机器人】机械臂建模开发: 工作流程 - MATLAB&Simulink
傅利叶GR-1 sim2sim到Mujoco环境中
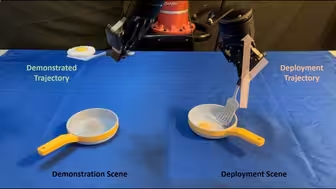
【CoRL2023】One-Shot Imitation Learning: A Pose Estimation Perspective
宇树B1 机械臂 机械手 协作抓取水瓶 #机器狗应用
Picker机械臂之舒展筋骨
机械臂协调控制复现
像稚辉君一样,搭建STM32 CLion开发环境,优雅的开发机械臂程序
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
具身智能技术综述上
【isaac sim-14】具身仿真-添加自定义的controller
英伟达GPU高阶教程-cuda核函数编译与启动流程分析(2)