V
主页
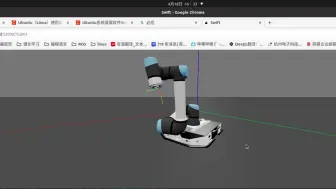
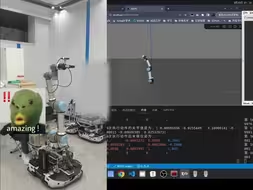
【论文复现】移动机械臂协同控制(八)——在Gazebo上实现UR5e_Tracer_Robot控制
发布人
由于python机器人工具箱自带的仿真器不含物理仿真,研究碰撞检测不太适合,所以在Gazebo上实现移动机械臂的仿真控制,这里是用的关节控制,不是协同控制
打开封面
下载高清视频
观看高清视频
视频下载器
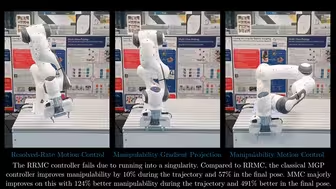
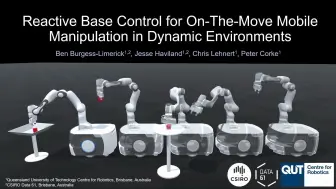
【论文分享】移动机械臂协同控制(一) —— 机械臂反应式控制
【论文复现】移动机械臂协同控制(十) Gazebo无重力补偿
【论文分享】移动机械臂协同控制(三)—— 机械臂+移动底盘实现车臂协同控制
【论文复现】移动机械臂协同控制(五)——UR5e_Tracer_Robot病态到达姿势
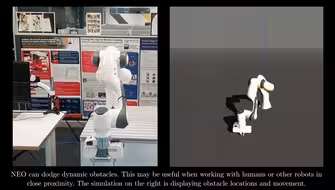
【论文复现】移动机械臂协同控制(二)——机械臂动态避障
【论文复现】移动机械臂协同控制(九) ——Gazebo上实现UR5e反应式控制
【论文分享】移动机械臂协同控制(四)—— 移动机械臂抓取动态物体
【论文复现】移动机械臂协同控制(七)——UR5e_Tracer_robot实物控制
【论文复现】移动机械臂协同控制(六)——UR5e_Tracer轨迹跟踪
【论文分享】移动机械臂协同控制(五) —— 移动机械臂任务失败恢复
【论文复现】移动机械臂协同控制( 一 )——UR5e反应式控制
【论文分享】移动机械臂协同控制(二)—— 机械臂反应式控制 + 动态避障
【论文复现】移动机械臂协同控制(三)——UR5e实物控制
【论文复现】移动机械臂协同控制(四)——UR5e_Tracer_Robot协同控制
【论文分享】移动机械臂协同控制(六) —— 移动机械臂全身动态避障+任务失败恢复
异构FPGA的HPS运行ROS2+路径规划,逻辑侧Drive-on-chip实现6轴机械臂控制
【全198集】不愧是吴恩达!一口气讲完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等深度学习神经网络算法,简直不要太爽!
机械臂导纳控制 moveit与gazebo联合仿真
01-机械臂算法和ROS设置
人形机器人 手指机械结构
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
基于分层优化的四足机器人全身运动控制搬运重物
2024年6月最新chatgpt】GPT4.0免费使用教程。免登录,直接使用。
【毕设】基于手势识别的机械臂控制系统
吹爆!这可能是导师都不讲的Chatgpt论文写作指导教程,哈工大博士手把手带你亲历论文从选题到投稿完整版,还搞不定一篇论文你来打我!
基于强化学习的机械臂零空间运动控制,2022年2月
双足机器人步态生成 MATLAB and Simulink
控制精具身智能机械臂负载:1.5kg,极限负载<3.5kg (完成抖动不明显的全范围移动,坚持30s),静态夹持负载极限4.0kg。
机械臂单机实测
6台机械臂的同步控制
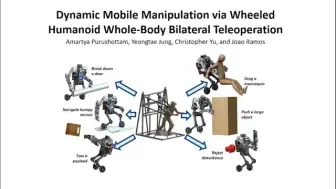
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
通过对抗运动先验学习四足机器人的双足行走
【全748集】字节大佬终于把 AI大模型(LLM)讲清楚了!通俗易懂,2024最新内部版,学完即就业!AGI商业化落地创业营,一门非常落地的AI大模型创业课!!
基于YOLOv8的多指灵巧臂手机器人倒水操作
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
机械臂 开摆!
Arduino交互设计|交互必看 “指挥机械臂”
【OCS2机器人强化学习】初学教程(1)
02-创建自定义机械臂
UR5机械臂基于扩散策略执行推箱任务