V
主页
ChatGPT发布1年半后,LLMs开源生态
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
女性成长19:权力,不过是人们想象出来的一种幻觉,不玩这个游戏,它,就控制不了你
字节万级GPU集群LLM训练
如何选择合适的开源LLMs
通过UCIe实现开放芯片生态系统
LLMs中的语言理解
家庭通用机器人
机器人泛化学习
ASPLOS2024上LLM推理服务优化分享
DéjàVu: 稀疏上下文的高效LLM推理服务
机器人学习中运动表示
边缘云端高效的LLM推理
数字实验室做机器人及模拟机器人开发
AI Hardware
Computing and Planning with LLMs
机器人可达性研究
[APNEET2023] 超大规模RDMA:经验和未来方向
最新Zuckerberg访谈,Llama 3.1, 开源,agents及安全等
KubeCon China 2023演讲:KubeVirt在Arm上的应用:增强Kubernetes生态系统中的虚拟化能力
编译器的黄金时代
通过扩散策略进行机器人灵活操作
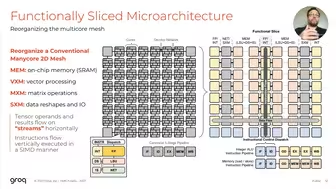
Groq张量流式处理器架构
[SIGCOMM2023] : Offloading
Foundational Models for Robot Control
Meta:大规模AI集群维护
通过学习规划和感知进行任务和运动规划
下一代机器人感知:3D场景图,可验证算法,自监督学习
扩散生成视频
神经场在机器人操作中的应用
从物理互动中学习结构化世界模型
机器人学习中的收缩理论
开源通用机器人构建
MuxServe:灵活的多路复用实现高效的多个LLM服务
AMSP:通过模型状态分区进行LLM扩展训练
在线ML边缘侧应用
一种结构化方法来实现机器人学习泛化
Stanford CS25 V4:大语言模型到多模态大模型
边缘AI
Munich AI 讲座: 机器人运动规划
Iceberg中的流式计算
学习可变形物体操作的长期双手动任务