V
主页
京东 11.11 红包
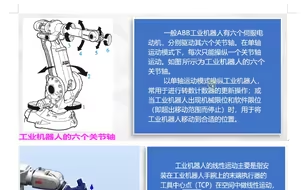
FANUC工业机器人手动操控6个关节运行(理论)
发布人
FANUC工业机器人手动操控6个关节运行(理论) 。FANUC工业机器人不是人,确切地说是机械手
打开封面
下载高清视频
观看高清视频
视频下载器
三菱工业机器人手动操控6个关节运行(理论)
FANUC工业机器人手动操控6个关节运行(实操)
FX5u入门到精通(29.数组应用循环+变址+子程序实战:求1+2+...+200的和)
EPLAN P8初级应用:电机正反转控制控制电路(3-10)
ABB机器人现场编程速成(8-12 手动操作ABB工业机器人)
工业机器人快速入门:5-6学习攻略之仿真和现场操作
三菱机器人软件Box3 简介及仿真实战(1-5概要)
EPLAN P8初级应用:电机正反转控制主电路(2-10)
三菱工业机器人手动操控6个关节的运行(实操)
快速掌握机器人运动学(6-10:动坐标系位姿的齐次坐标描述)
快速掌握机器人运动学(2-10:数学基础之矩阵)
ABB机器人手动操控6个关节运动RB-120
FX5用户手册(定位篇)介绍1-5:定义与功能
快速掌握机器人运动学(7-10:建立机器人坐标系方法)
快速掌握机器人运动学(5-10:齐次坐标)
FX5U入门到精通【44.ST语言应用(7-29:沿操作单按钮控制之2种ST指令与梯形图比较】FX5U入门到精通【44
应网友要求,细化200SMART间接,变址寻址案例详解(思路与运行:1-3)
快速掌握机器人运动学(9-10:机器人运动学正方程)
快速掌握机器人运动学(6“-10:动坐标系位姿的齐次坐标描述)有声
FX5U+JE-A位置控制模式案例及实战拓展(1-36:案例实物图片、主要元器件)
ABB机器人现场编程速成(10-12 重定位运动的手动操纵)
一台电脑实现WIFI和4G两种方式的远程监控案例(6-6研制步骤C)
工业机器人快速入门:3-6机器人使用注意事项
工业机器人快速入门:2-6国内外机器人主要品牌特点及使用场合B-B
FX5U+JE-A位置控制模式案例及实战拓展(30-36:手动及5种回原点理论A)
仿真:FX5U巧用三角函数等指令求等角梯形面积
FX5u入门到精通(32.数据控制指令应用)
FX5U入门到精通-熟能生巧【45.ST语言应用(8-29:第二种沿操作单按钮之ST与梯形图编程方式比较】
一台电脑实现WIFI和4G两种方式的远程监控案例(1-6硬件组成及接线)
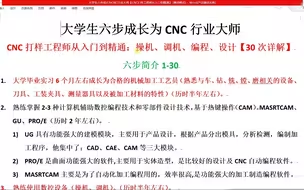
大学生六步成长为CNC行业大师(1-30 6步简介)
多台电脑对现场一体机完成远程监控之笔记本电脑
FX5U的MODBUS串行通信功能及案例介绍【13-18:扩展板场合】
EPLAN P8初级应用:加入主要元件的文字说明(7-10)
FX5U+JE-A位置控制模式案例及实战拓展(17-36:案例编程之指示灯亮灭)
EPLAN P8初级应用:初识EPLAN P8(1-10)
FX5u入门到精通【39. ST 语言及应用(2-29:ST语言编程的系统帮助】
回复网友要求:对一体机模拟量现场及远程控制案例之远程细化(4-5)HMI无线在线模拟
FX5U+JE-A位置控制模式案例及实战拓展(31-36:手动及5种回原点理论B)
一台电脑实现WIFI和4G两种方式的远程监控案例(4G模式实物场景A)
FX5U之PLC和屏一锅烩,巧用置位复位指令正反转控制